Nutanix AOS storage is the scale-out storage technology that appears to the hypervisor like any centralized storage array, however all of the I/Os are handled locally to provide the highest performance. More detail on how these nodes form a distributed system can be found in the next section.
Nutanix AOS storage is composed of the following high-level struct:
The following figure shows how these map between AOS and the hypervisor:
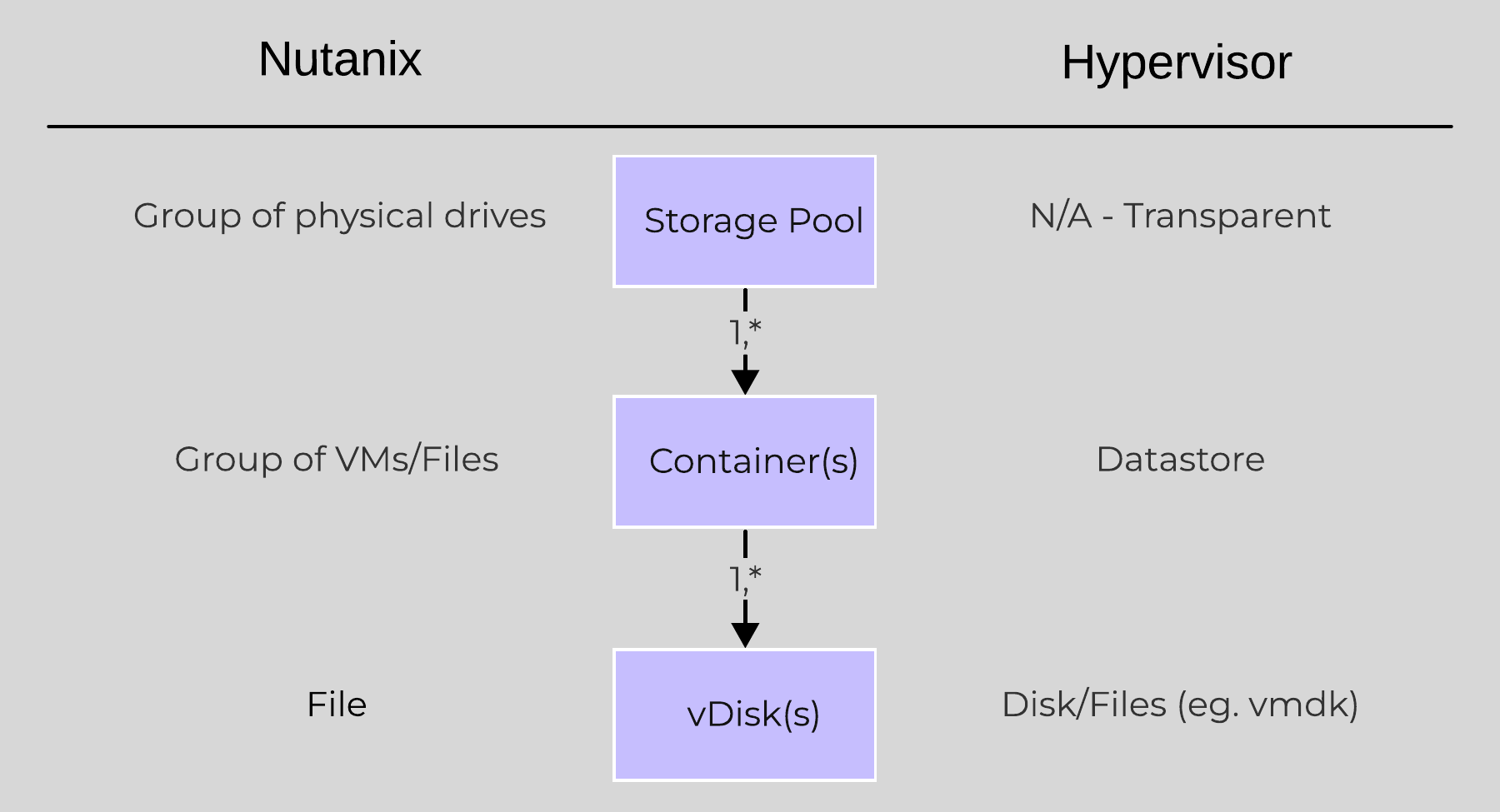 High-level Filesystem Breakdown
High-level Filesystem Breakdown
The following figure shows how these structs relate between the various file systems:
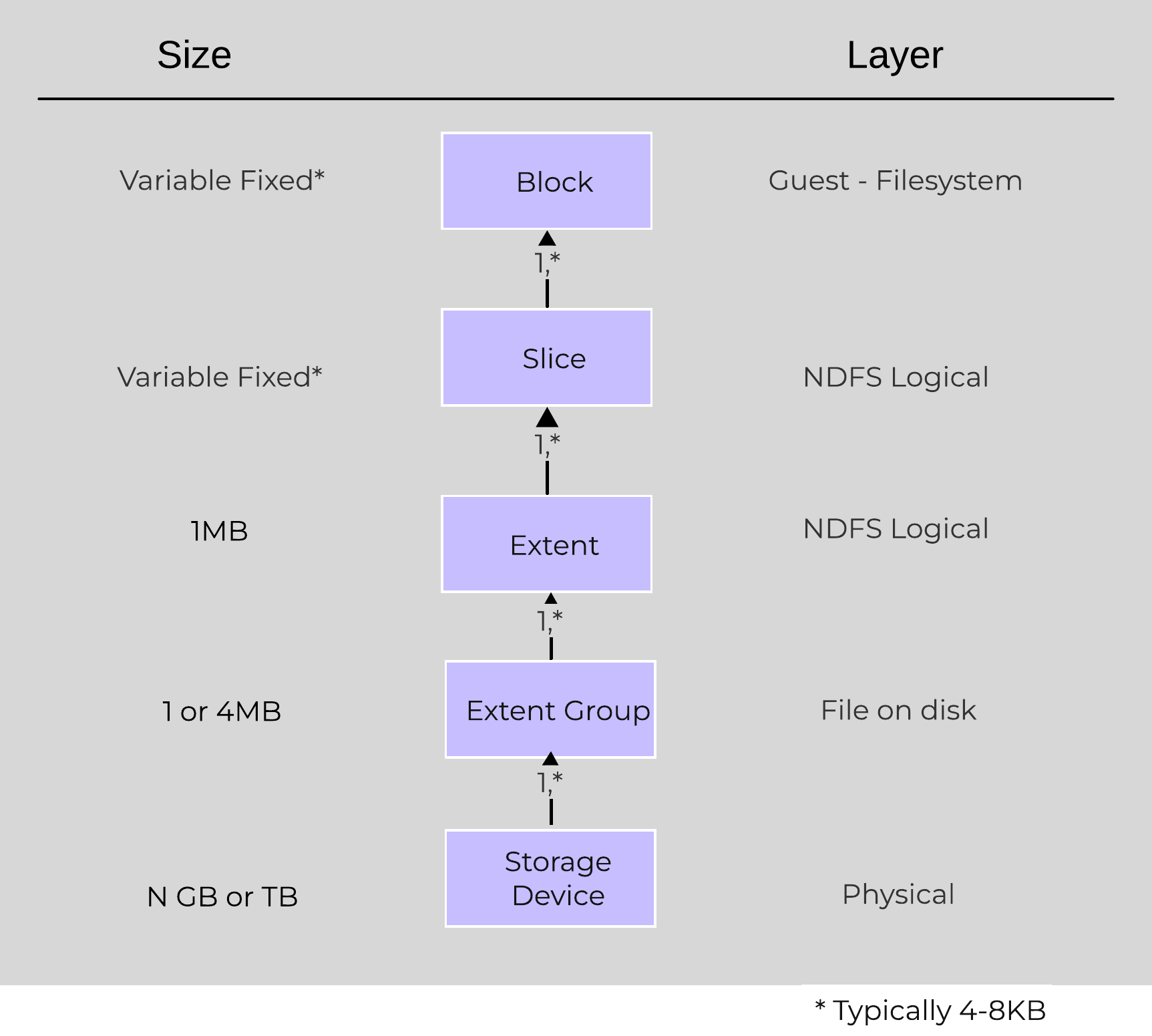 Low-level Filesystem Breakdown
Low-level Filesystem Breakdown
Here is another graphical representation of how these units are related:
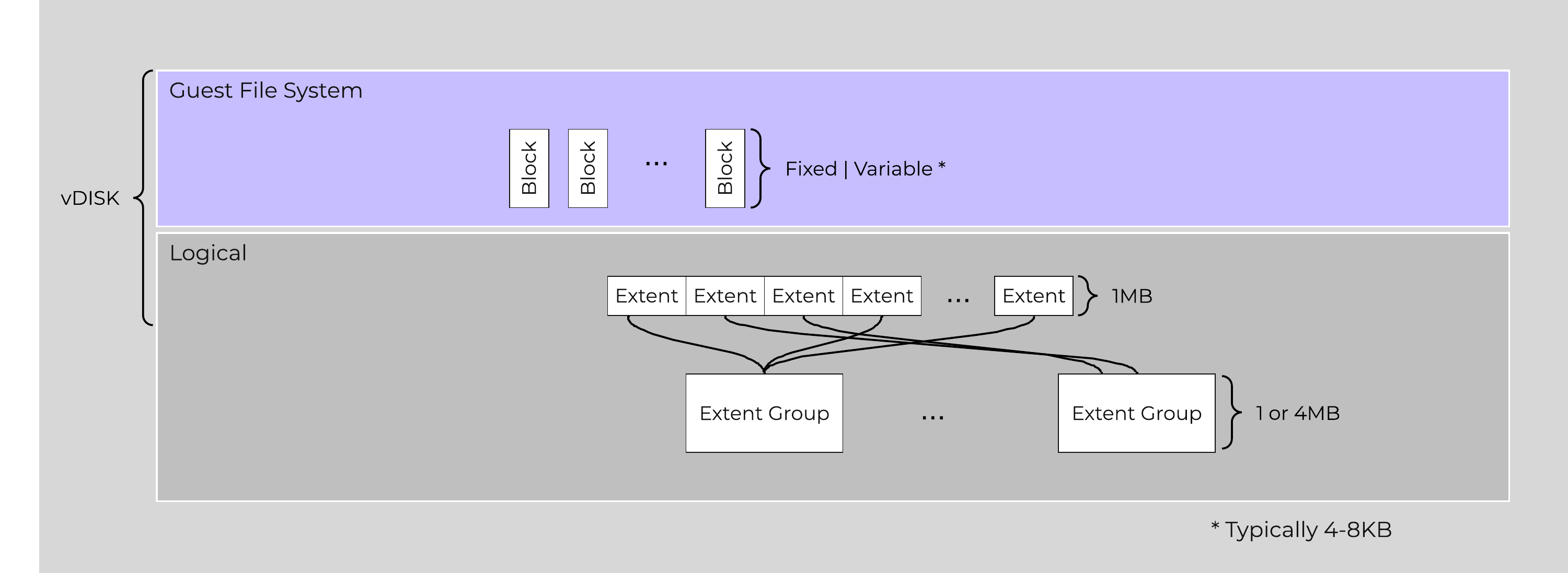 Graphical Filesystem Breakdown
Graphical Filesystem Breakdown
For a visual explanation, you can watch the following video: LINK
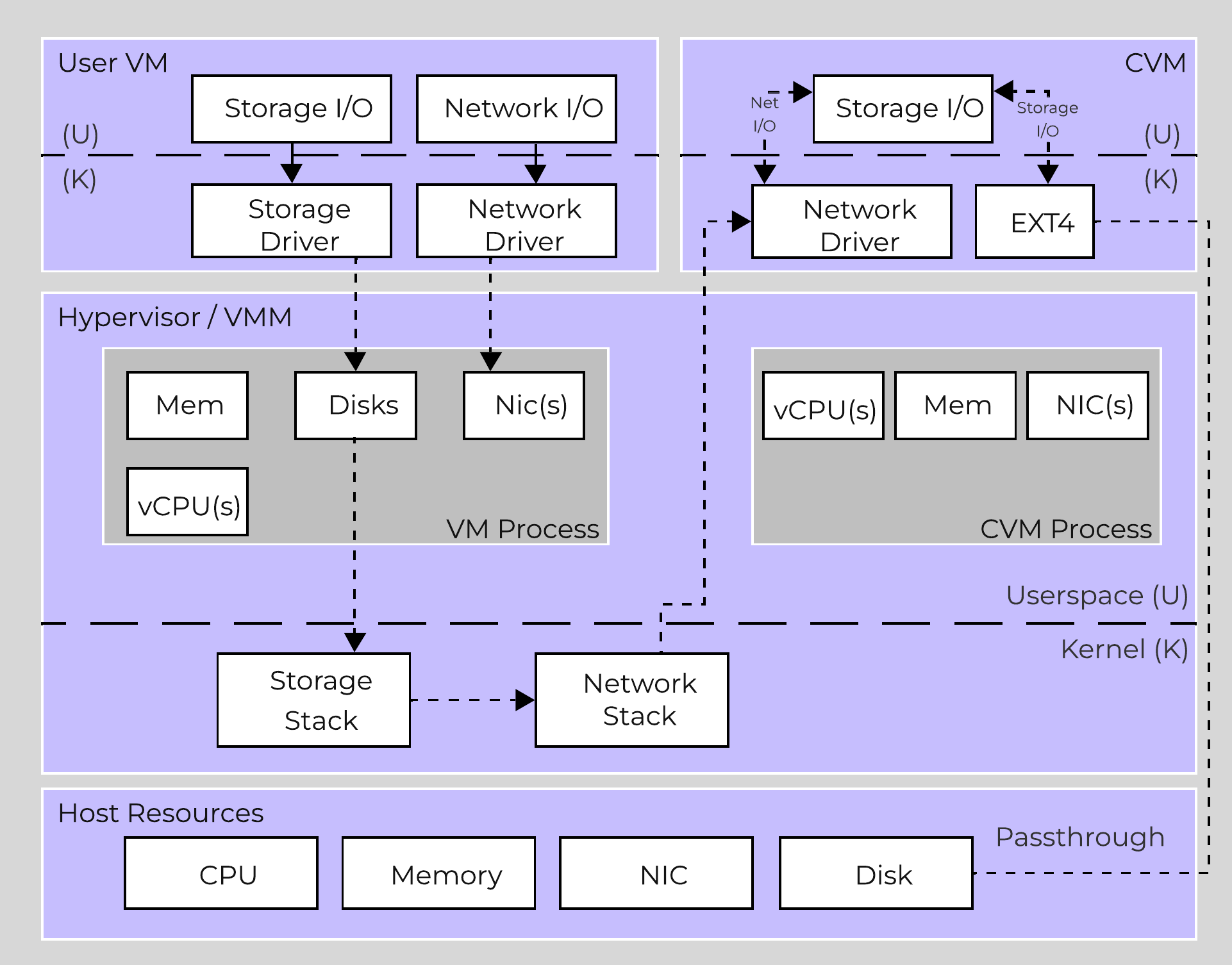
The typical hyperconverged storage I/O path can be characterized into the following core layers:
The following image shows a high-level overview of these layers:
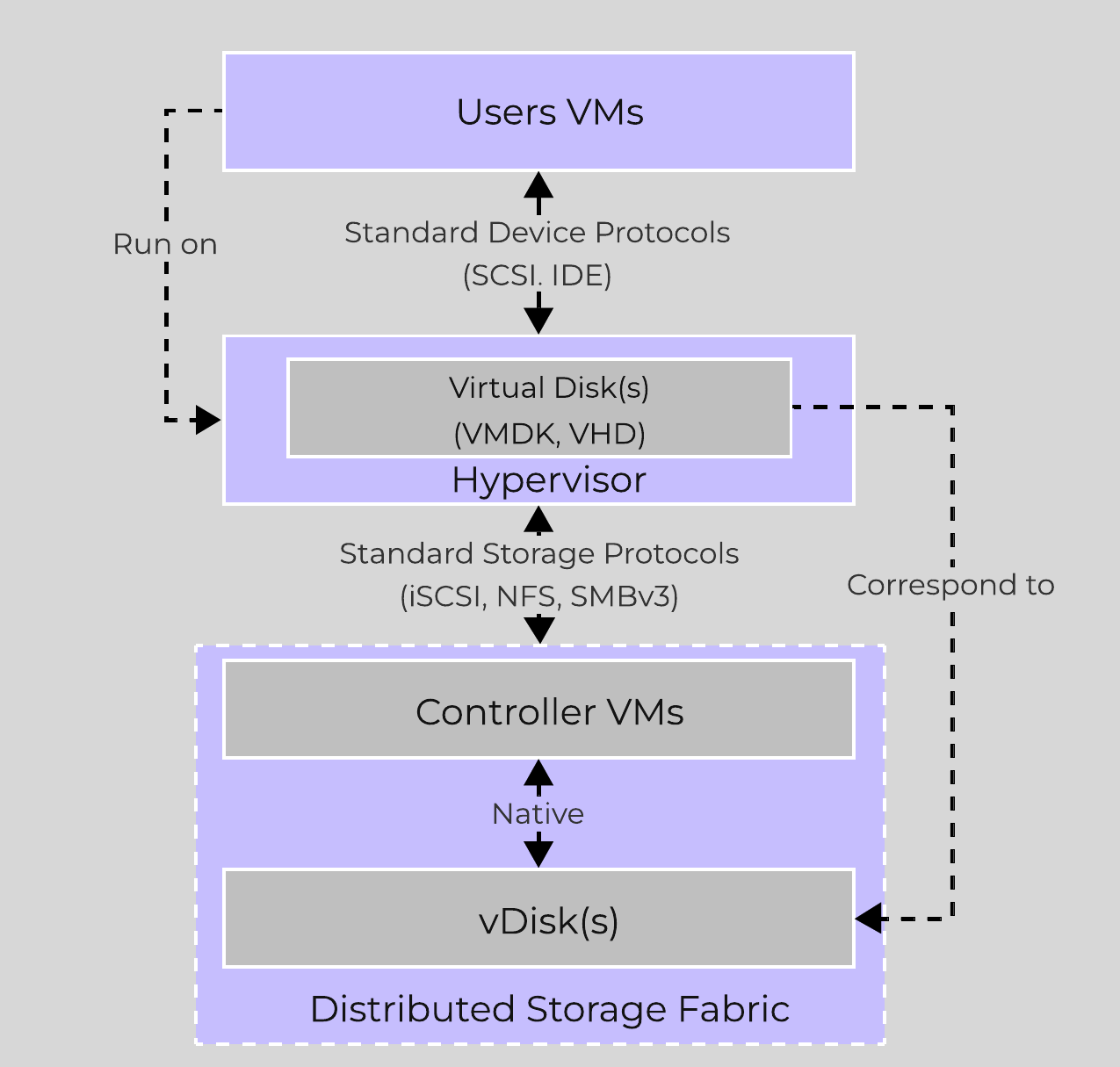 High-level I/O Path - Traditional
High-level I/O Path - Traditional
Within the CVM the Stargate process is responsible for handling all storage I/O requests and interaction with other CVMs / physical devices. Storage device controllers are passed through directly to the CVM so all storage I/O bypasses the hypervisor.
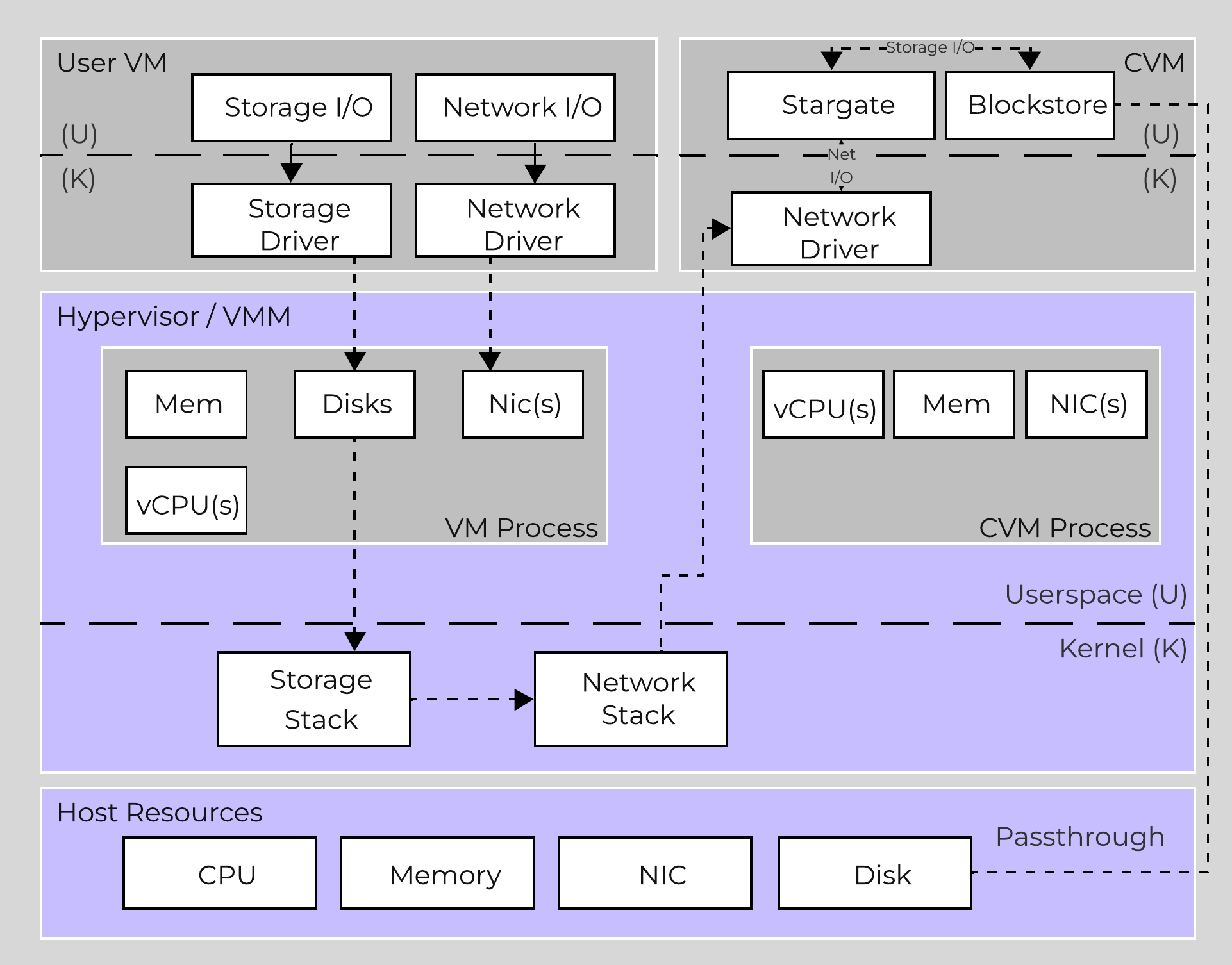
The following image shows a high-level overview of the traditional I/O path:
 High-level I/O Path
High-level I/O Path
Nutanix BlockStore is an AOS capability which creates an extensible filesystem and block management layer all handled in user space. This eliminates the filesystem from the devices and removes the invoking of any filesystem kernel driver. The introduction of newer storage media (e.g. NVMe), devices now come with user space libraries to handle device I/O directly (e.g. SPDK) eliminating the need to make any system calls (context switches). With the combination of BlockStore + SPDK all Stargate device interaction has moved into user space eliminating any context switching or kernel driver invocation.
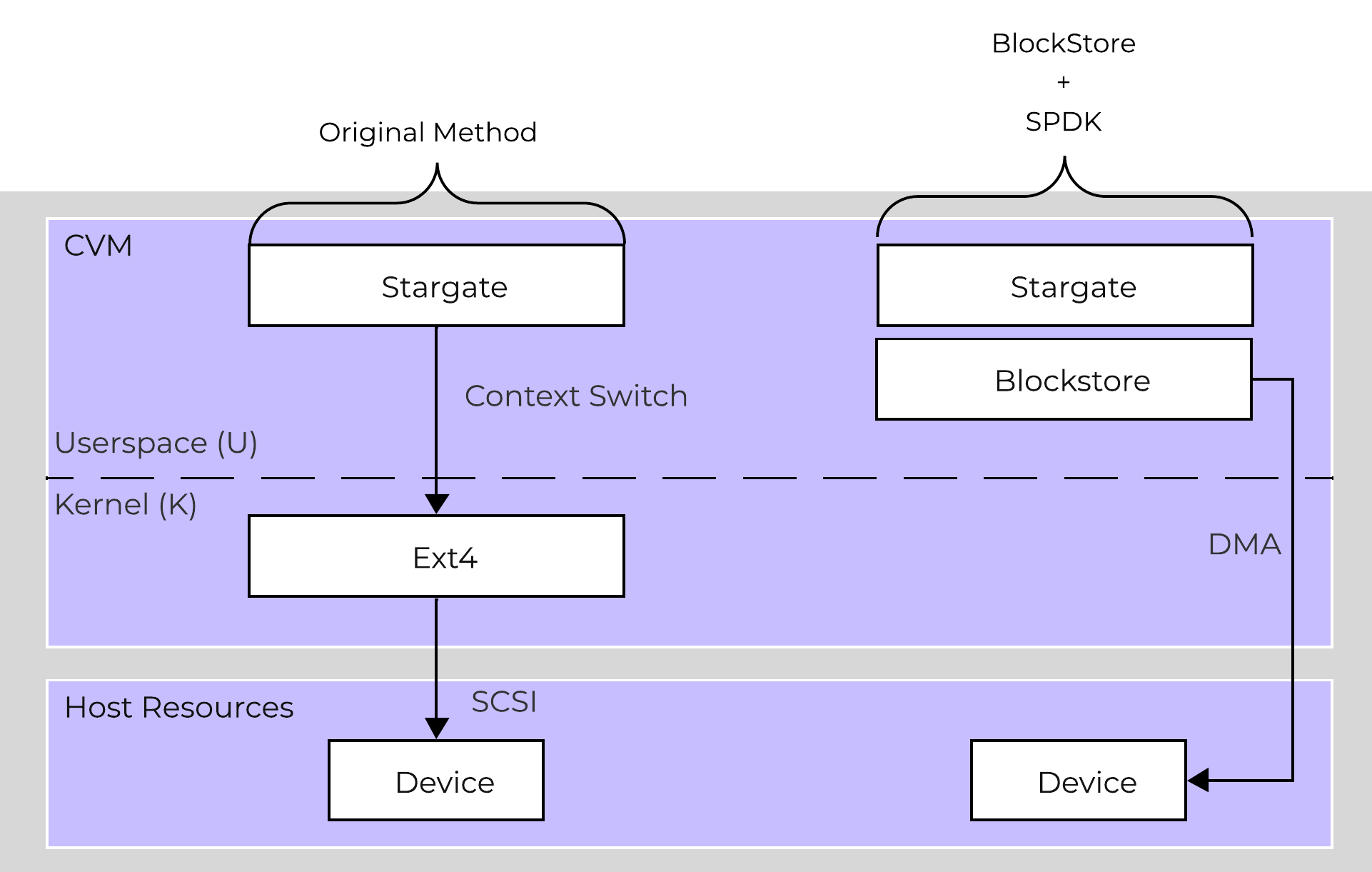 Stargate - Device I/O Path
Stargate - Device I/O Path
The following image shows a high-level overview of the updated I/O path with BlockStore + SPDK:
 High-level I/O Path - BlockStore
High-level I/O Path - BlockStore
To perform data replication the CVMs communicate over the network. With the default stack this will invoke kernel level drivers to do so.
However, with RDMA these NICs are passed through to the CVM, bypassing the hypervisor and reducing interrupts. Also, within the CVM all network traffic using RDMA only uses a kernel level driver for the control path, then all actual data I/O is done in user-space without any context switches.
The following image shows a high-level overview of the I/O path with RDMA:
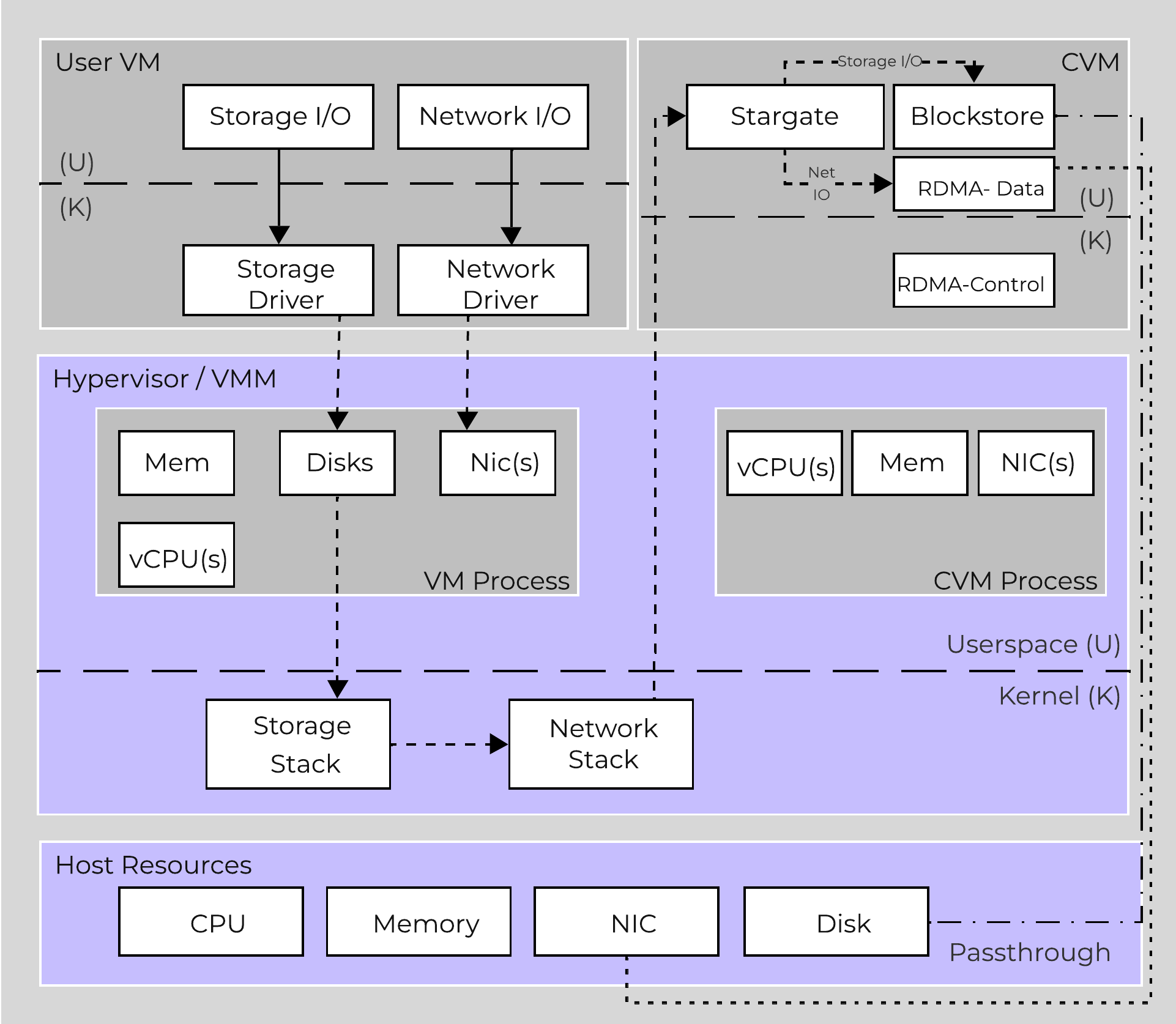 High-level I/O Path - RDMA
High-level I/O Path - RDMA
To summarize, the following enhancements optimize with the following:
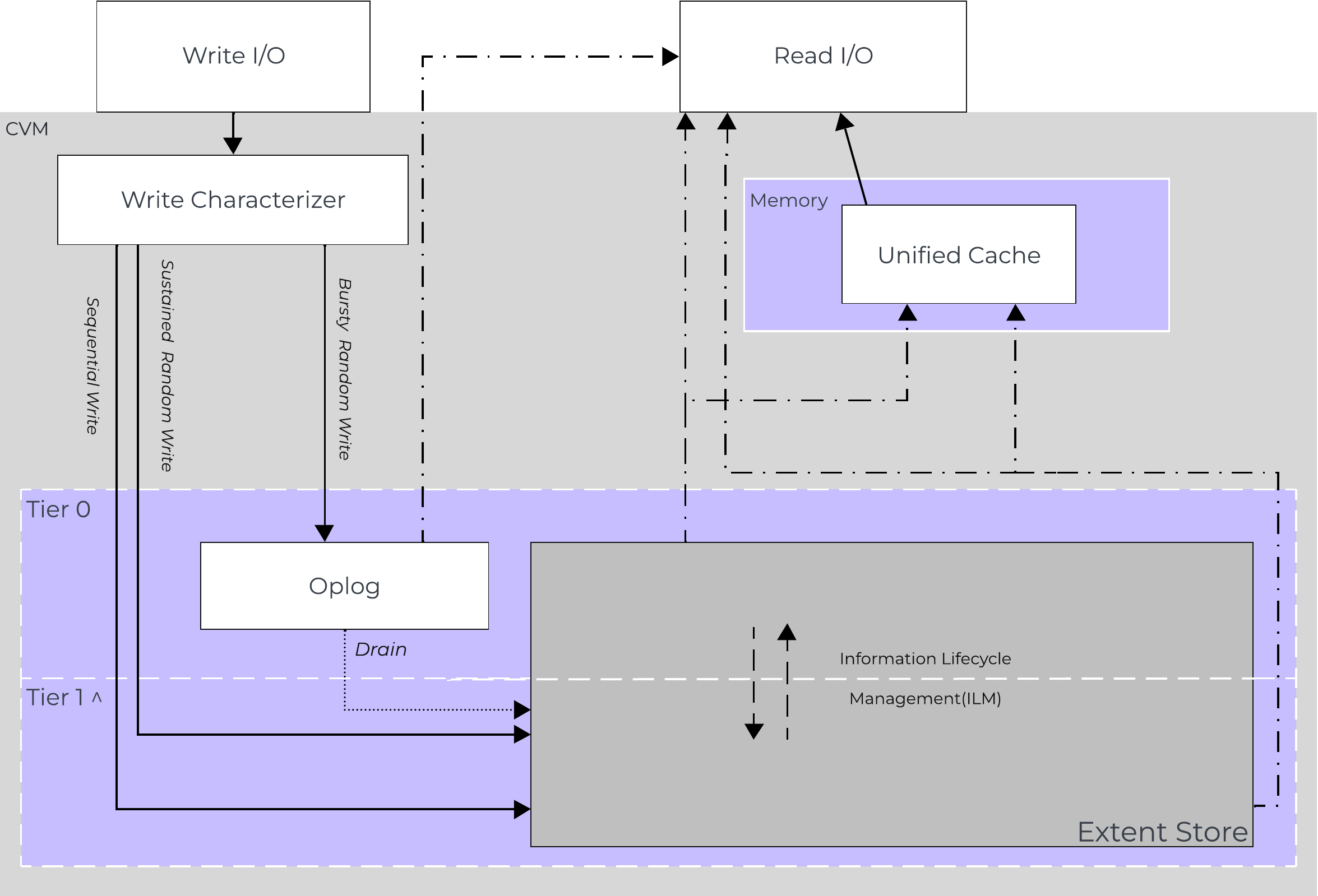
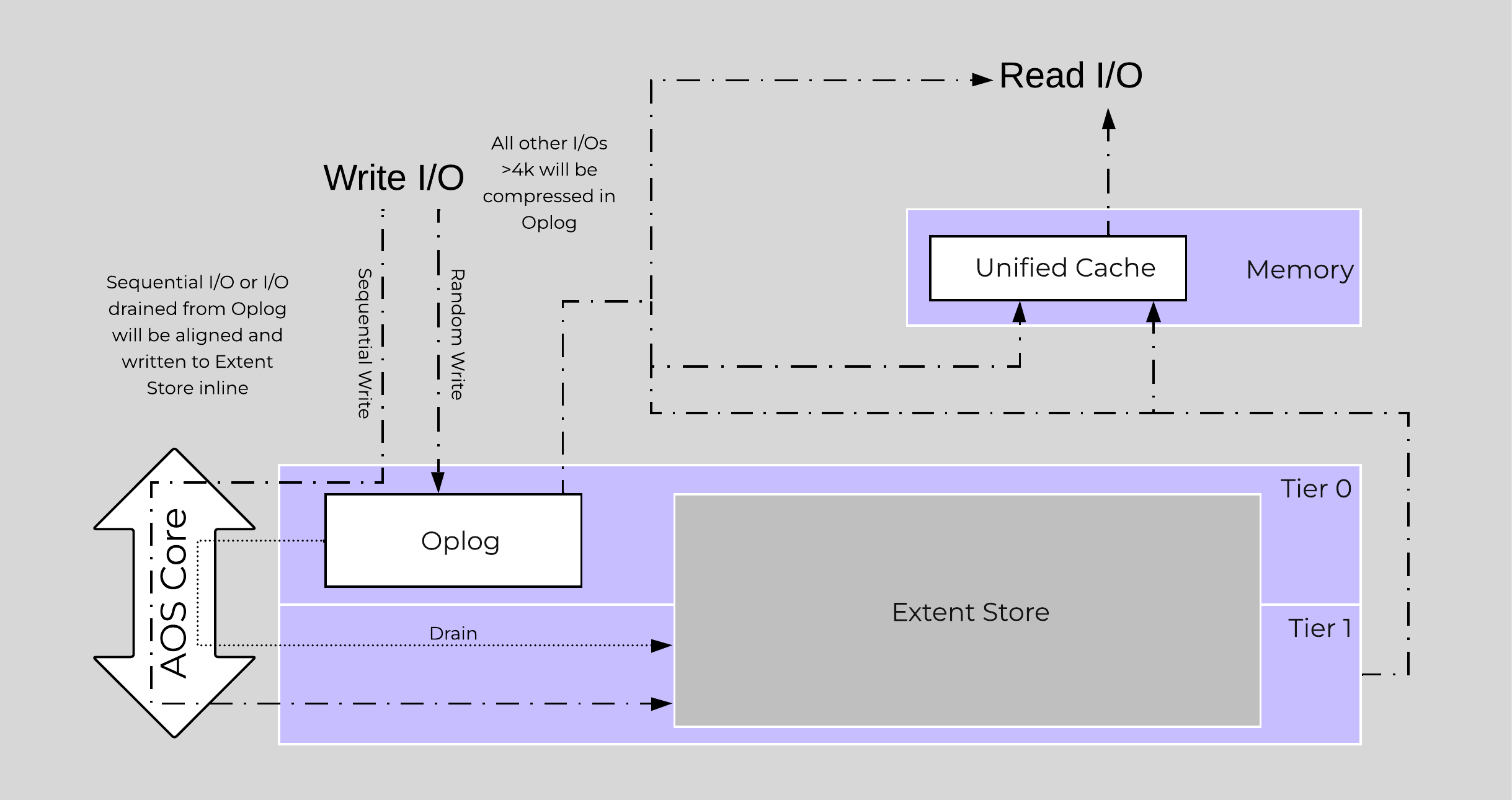
Within the CVM the Stargate process is responsible for handling all I/O coming from user VMs (UVMs) and persistence (RF, etc.). When a write request comes to Stargate, there is a write characterizer which will determine if the write gets persisted to the OpLog for bursty random writes, or to Extent Store for sustained random and sequential writes. Read requests are satisfied from Oplog or Extent Store depending on where the data is residing when it is requested.
The Nutanix I/O path is composed of the following high-level components:
 AOS I/O Path
AOS I/O Path
^:
Write IO is deemed as sequential when there is more than 1.5MB of outstanding write IO to a vDisk. IOs meeting this will bypass the OpLog and go directly to the Extent Store since they are already large chunks of aligned data and won't benefit from coalescing.
This is controlled by the following Gflag: vdisk_distributed_oplog_skip_min_outstanding_write_bytes.
All other IOs, including those which can be large (e.g. >64K) will still be handled by the OpLog.
Description: The Autonomous Extent Store (AES) is a method for writing / storing data in the Extent Store. It leverages a mix of primarily local + global metadata (more detail in the ‘Scalable Metadata’ section following) allowing for much more efficient sustained performance due to metadata locality. For sustained random write workloads, these will bypass the OpLog and be written directly to the Extent Store using AES. For bursty random workloads these will take the typical OpLog I/O path then drain to the Extent Store using AES where possible.
In AOS 6.8, an enhancement to AES was introduced called AES Optimized Metadata to improve performance and maximize resource utlization for all-flash and NVMe clusters. It was built to reduce CPU usage and drive the performance for sustained random writes going to the Extent Store. With AES Optimized Metadata, writes are batched into fewer transaction updates. This helps in reducing the number of disk operations needed to persist sustained random writes to the extent store. This translates to more optimized CPU usage through fewer cycles consumed and drives higher sustained random write performance on all-flash and NVME clusters.
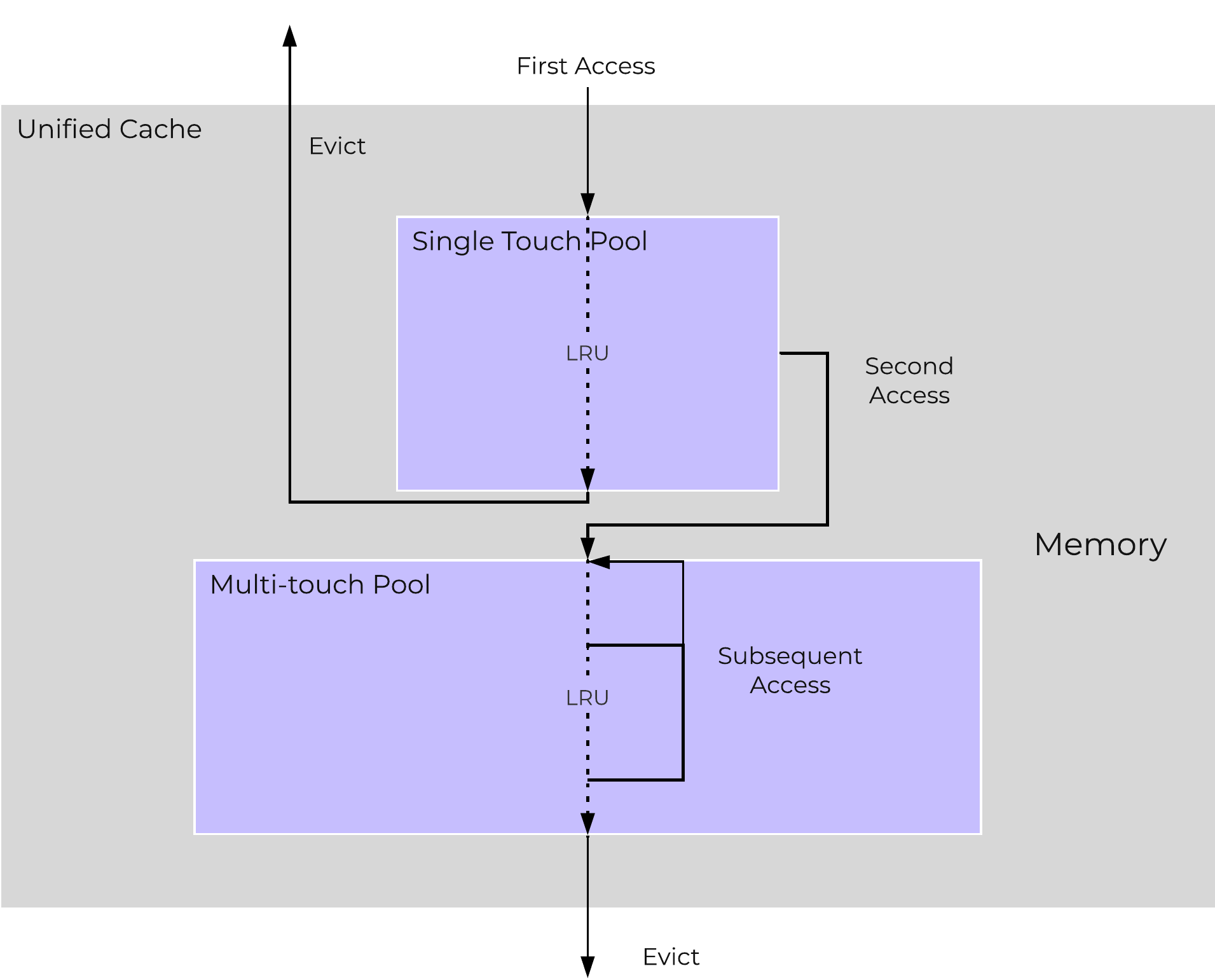
The following figure shows a high-level overview of the Unified Cache:
 AOS Unified Cache
AOS Unified Cache
Data is brought into the cache at a 4K granularity and all caching is done real-time (e.g. no delay or batch process data to pull data into the cache).
Each CVM has its own local cache that it manages for the vDisk(s) it is hosting (e.g. VM(s) running on the same node). When a vDisk is cloned (e.g. new clones, snapshots, etc.) each new vDisk has its own block map and the original vDisk is marked as immutable. This allows us to ensure that each CVM can have it's own cached copy of the base vDisk with cache coherency.
In the event of an overwrite, that will be re-directed to a new extent in the VM's own block map. This ensures that there will not be any cache corruption.
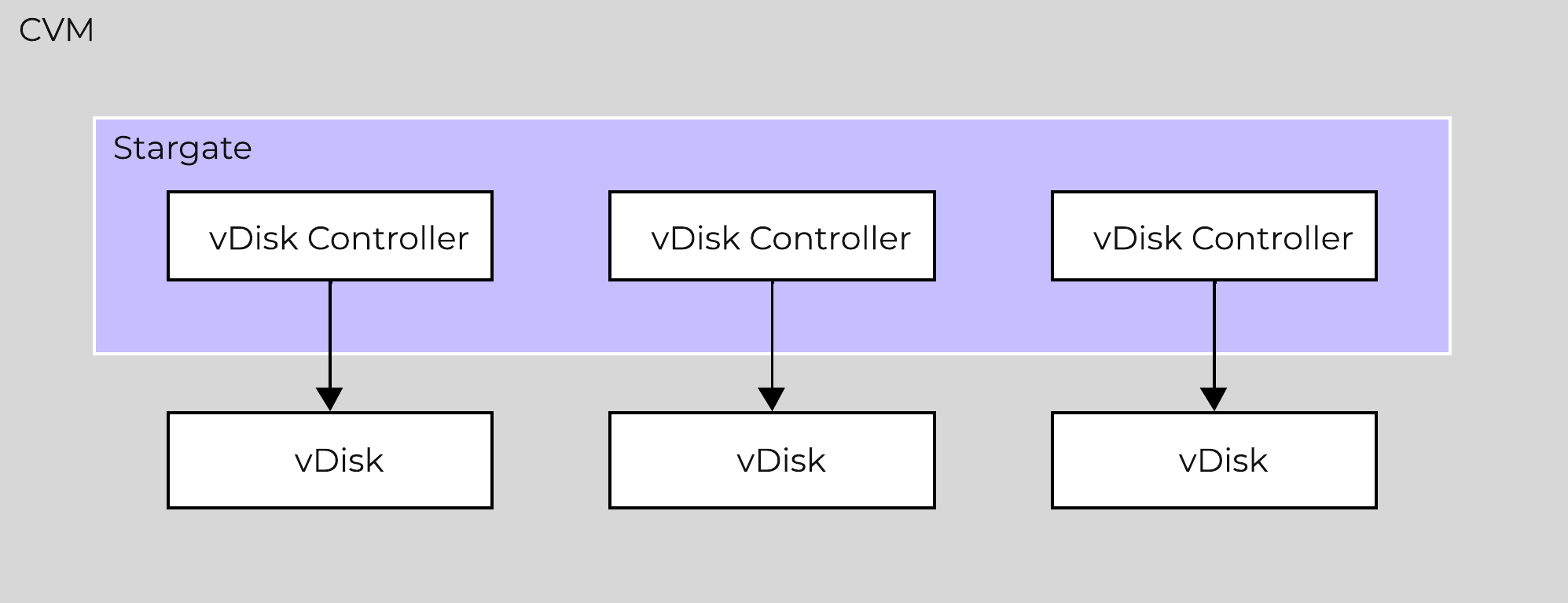
AOS was designed and architected to deliver performance for applications at scale. Inside Stargate, I/O is processed by threads for every vdisk created by something called vdisk controller. Every vdisk gets its own vdisk controller inside Stargate responsible for I/O for that vdisk. The expectation was that workloads and applications would have multiple vdisks each having its own vdisk controller thread capable of driving high performance the system is capable of delivering.
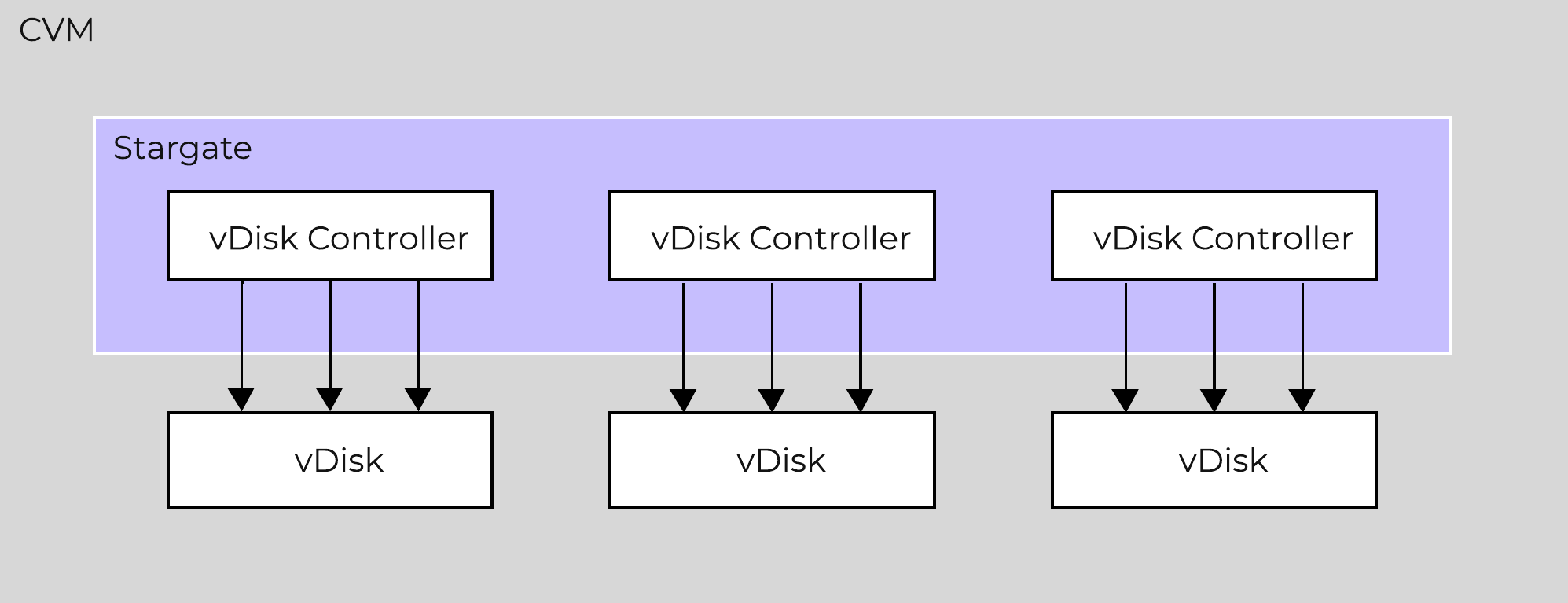
This architecture works well except in cases of traditional applications and workloads that had VMs with single large vdisk. These VMs were not able to leverage the capabilities of AOS to its fullest. So we enhanced our architecture such that the vdisk controller requests to a single vdisk are now distributed to multiple vdisk controllers. This is accomplished by creating shards of the controller, each having its own thread. I/O distribution to multiple controllers is done by a primary controller so for external interaction this still looks like a single vdisk. This results in effectively sharding the single vdisk making it multi-threaded. This enhancement alongwith other technologies talked above like Blockstore, AES allows AOS to deliver consistent high performance at scale even for traditional applications that use a single vdisk.
For a visual explanation, you can watch the following YouTube video: Tech TopX by Nutanix University: Scalable Metadata
Metadata is at the core of any intelligent system and is even more critical for any filesystem or storage array. For those unsure about the term ‘metadata’; essentially metadata is ‘data about data’. In terms of AOS, there are a few key principles that are critical for its success:
As of AOS 5.10 metadata is broken into two areas: global vs. local metadata (prior all metadata was global). The motivation for this is to optimize for “metadata locality” and limit the network traffic on the system for metadata lookups.
The basis for this change is that not all data needs to be global. For example, every CVM doesn’t need to know which physical disk a particular extent sits on, they just need to know which node holds that data, and only that node needs to know which disk has the data.
By doing this we can limit the amount of metadata stored by the system (eliminate metadata RF for local only data), and optimize for “metadata locality.”
The following image shows the differentiation between global vs. local metadata:
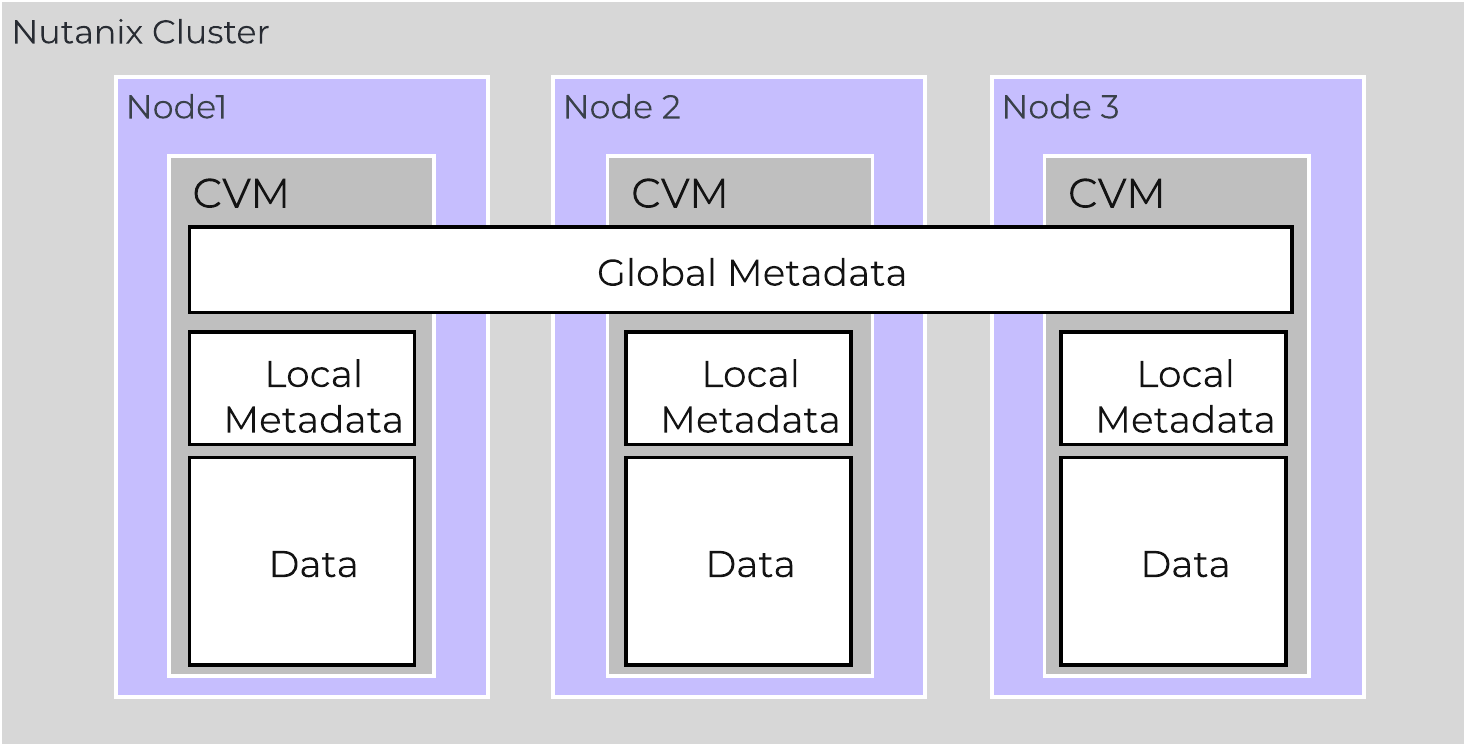 Global vs. Local Metadata
Global vs. Local Metadata
The section below covers how global metadata is managed:
As mentioned in the architecture section above, AOS utilizes a “ring-like” structure as a key-value store which stores essential global metadata as well as other platform data (e.g., stats, etc.). In order to ensure global metadata availability and redundancy a replication factor (RF) is utilized among an odd amount of nodes (e.g., 3, 5, etc.). Upon a global metadata write or update, the row is written to a node in the ring that owns that key and then replicated to n number of peers (where n is dependent on cluster size). A majority of nodes must agree before anything is committed, which is enforced using the Paxos algorithm. This ensures strict consistency for all data and global metadata stored as part of the platform.
The following figure shows an example of a global metadata insert/update for a 4 node cluster:
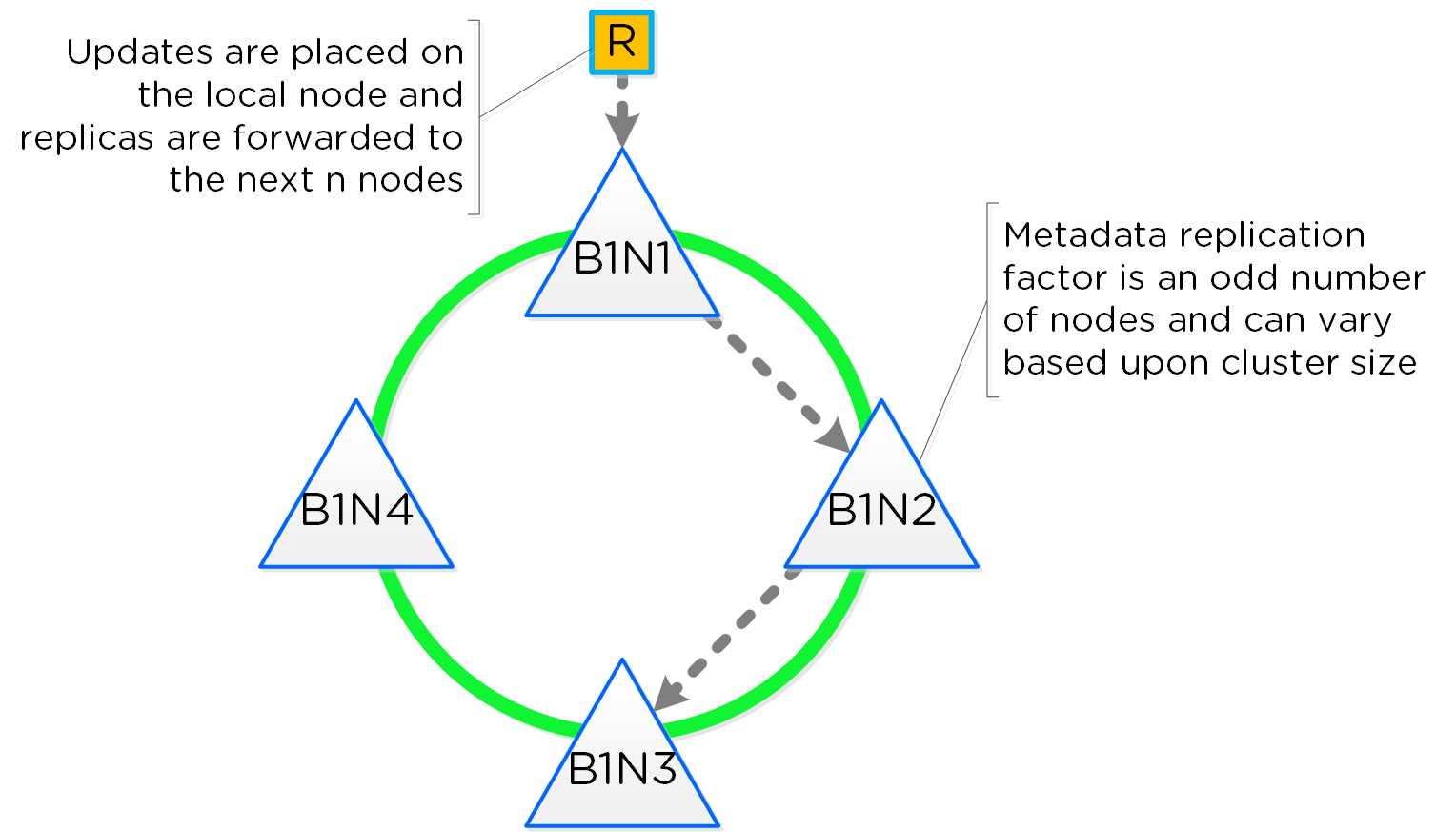 Cassandra Ring Structure
Cassandra Ring Structure
Performance at scale is also another important struct for AOS global metadata. Contrary to traditional dual-controller or “leader/worker” models, each Nutanix node is responsible for a subset of the overall platform’s metadata. This eliminates the traditional bottlenecks by allowing global metadata to be served and manipulated by all nodes in the cluster. A consistent hashing scheme is utilized for key partitioning to minimize the redistribution of keys during cluster size modifications (also known as “add/remove node”). When the cluster scales (e.g., from 4 to 8 nodes), the nodes are inserted throughout the ring between nodes for “block awareness” and reliability.
The following figure shows an example of the global metadata “ring” and how it scales:
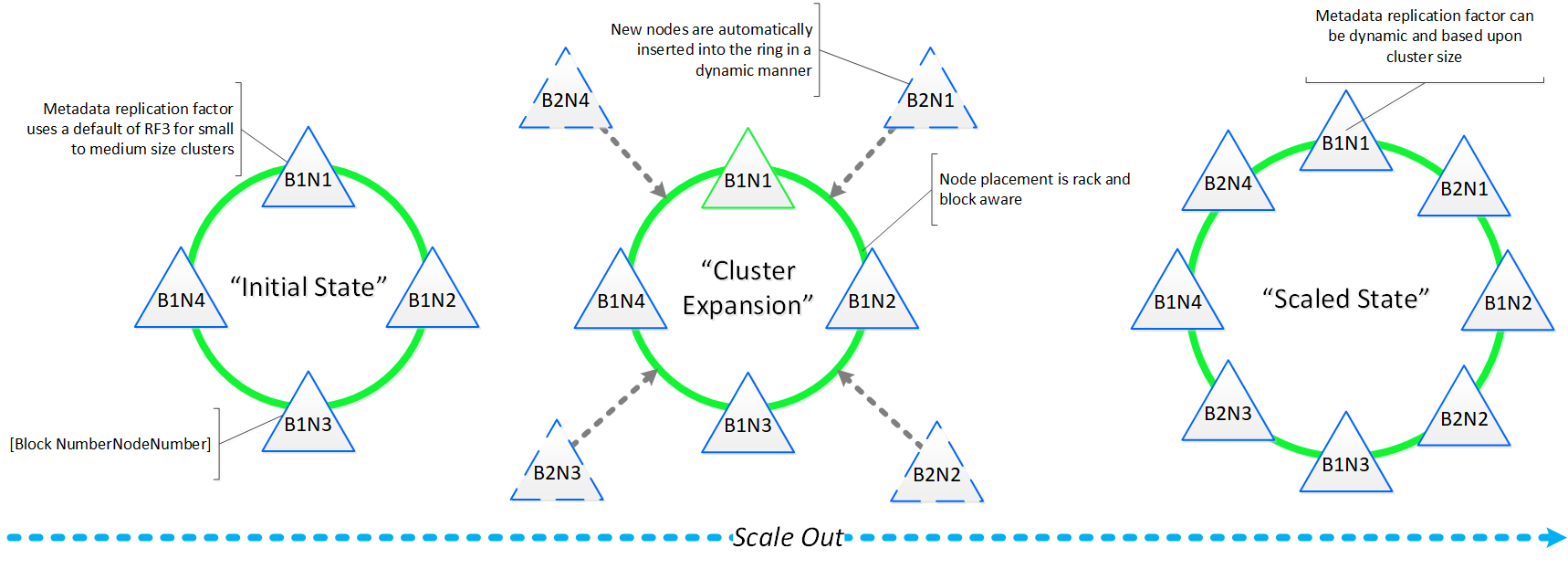 Cassandra Scale Out
Cassandra Scale Out
For a visual explanation, you can watch the following video: LINK
The Nutanix platform currently uses a resiliency factor, also known as a replication factor (RF), and checksum to ensure data redundancy and availability in the case of a node or disk failure or corruption. As explained above, the OpLog acts as a staging area to absorb incoming writes onto a low-latency SSD tier. Upon being written to the local OpLog, the data is synchronously replicated to another one or two Nutanix CVM’s OpLog (dependent on RF) before being acknowledged (Ack) as a successful write to the host. This ensures that the data exists in at least two or three independent locations and is fault tolerant. NOTE: For RF3, a minimum of 5 nodes is required since metadata will be RF5.
OpLog peers are chosen for every episode (1GB of vDisk data) and all nodes actively participate. Multiple factors play into which peers are chosen (e.g. response time, business, capacity utilization, etc). This eliminates any fragmentation and ensures every CVM/OpLog can be used concurrently.
Data RF is configured via Prism and is done at the container level. All nodes participate in OpLog replication to eliminate any “hot nodes”, ensuring linear performance at scale. While the data is being written, a checksum is computed and stored as part of its metadata. Data is then asynchronously drained to the extent store where the RF is implicitly maintained. In the case of a node or disk failure, the data is then re-replicated among all nodes in the cluster to maintain the RF. Any time the data is read, the checksum is computed to ensure the data is valid. In the event where the checksum and data don’t match, the replica of the data will be read and will replace the non-valid copy.
Data is also consistently monitored to ensure integrity even when active I/O isn’t occurring. Stargate’s scrubber operation will consistently scan through extent groups and perform checksum validation when disks aren’t heavily utilized. This protects against things like bit rot or corrupted sectors.
The following figure shows an example of what this logically looks like:
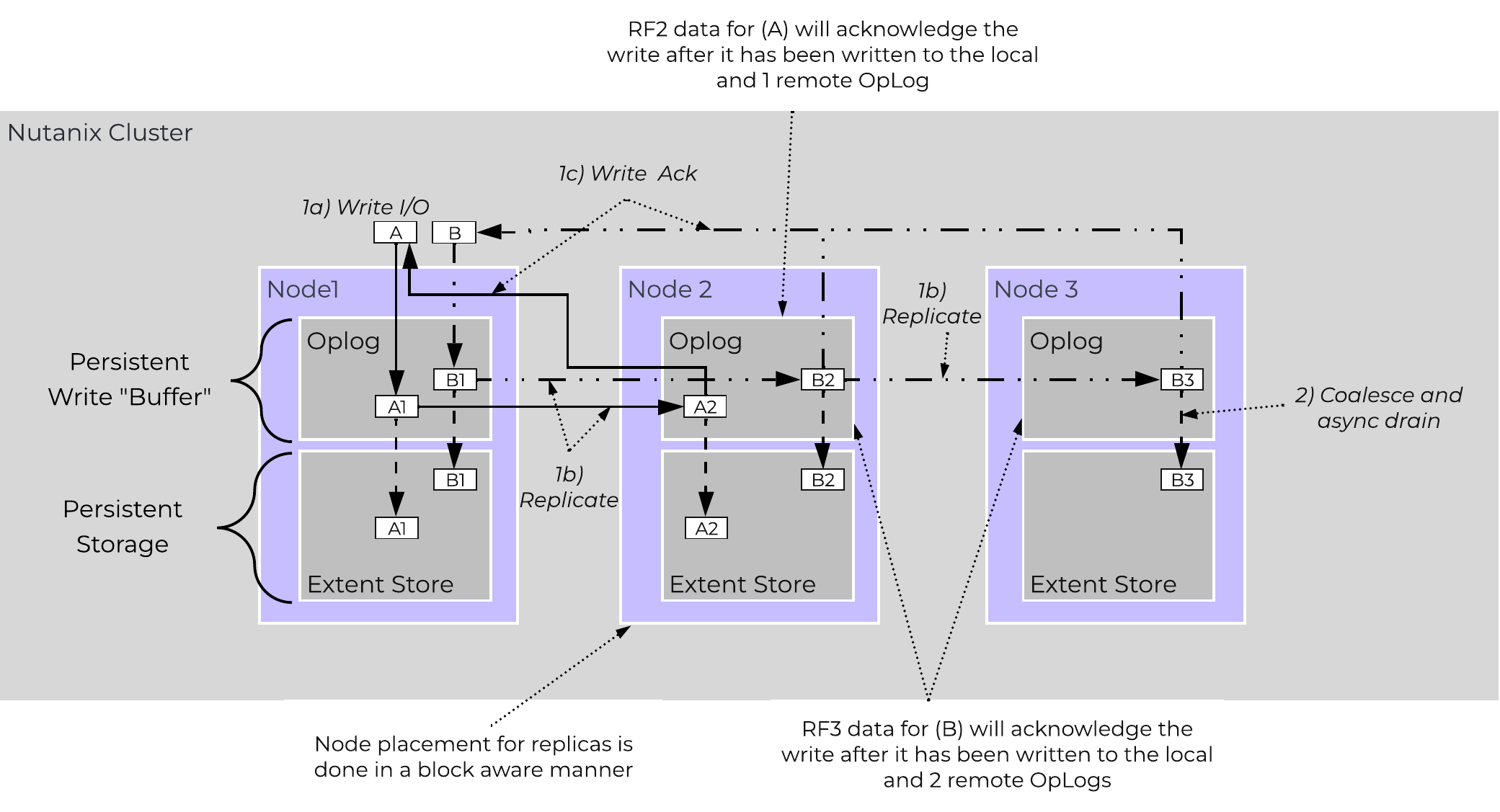 AOS Data Protection
AOS Data Protection
For a visual explanation, you can watch the following video: LINK
Availability Domains (aka node/block/rack awareness) is a key struct for distributed systems to abide by for determining component and data placement. Nutanix refers to a “block” as the chassis which contains either one, two, or four server “nodes” and a “rack” as a physical unit containing one or more “block”. NOTE: A minimum of 3 blocks must be utilized for block awareness to be activated, otherwise node awareness will be used.
Nutanix currently supports the following levels or awareness:
It is recommended to utilize uniformly populated blocks / racks to ensure the awareness is enabled and no imbalance is possible. Common scenarios and the awareness level utilized can be found at the bottom of this section. The 3-block requirement is due to ensure quorum. For example, a 3450 would be a block which holds 4 nodes. The reason for distributing roles or data across blocks is to ensure if a block fails or needs maintenance the system can continue to run without interruption. NOTE: Within a block, the redundant PSU and fans are the only shared components.
NOTE: Rack awareness requires the administrator to define “racks” in which the blocks are placed.
The following shows how this is configured in Prism:
 Rack Configuration
Rack Configuration
Awareness can be broken into a few key focus areas:
With AOS, data replicas will be written to other [blocks/racks] in the cluster to ensure that in the case of a [block/rack] failure or planned downtime, the data remains available. This is true for both RF2 and RF3 scenarios, as well as in the case of a [block/rack] failure. An easy comparison would be “node awareness”, where a replica would need to be replicated to another node which will provide protection in the case of a node failure. Block and rack awareness further enhances this by providing data availability assurances in the case of [block/rack] outages.
The following figure shows how the replica placement would work in a 3-block deployment:
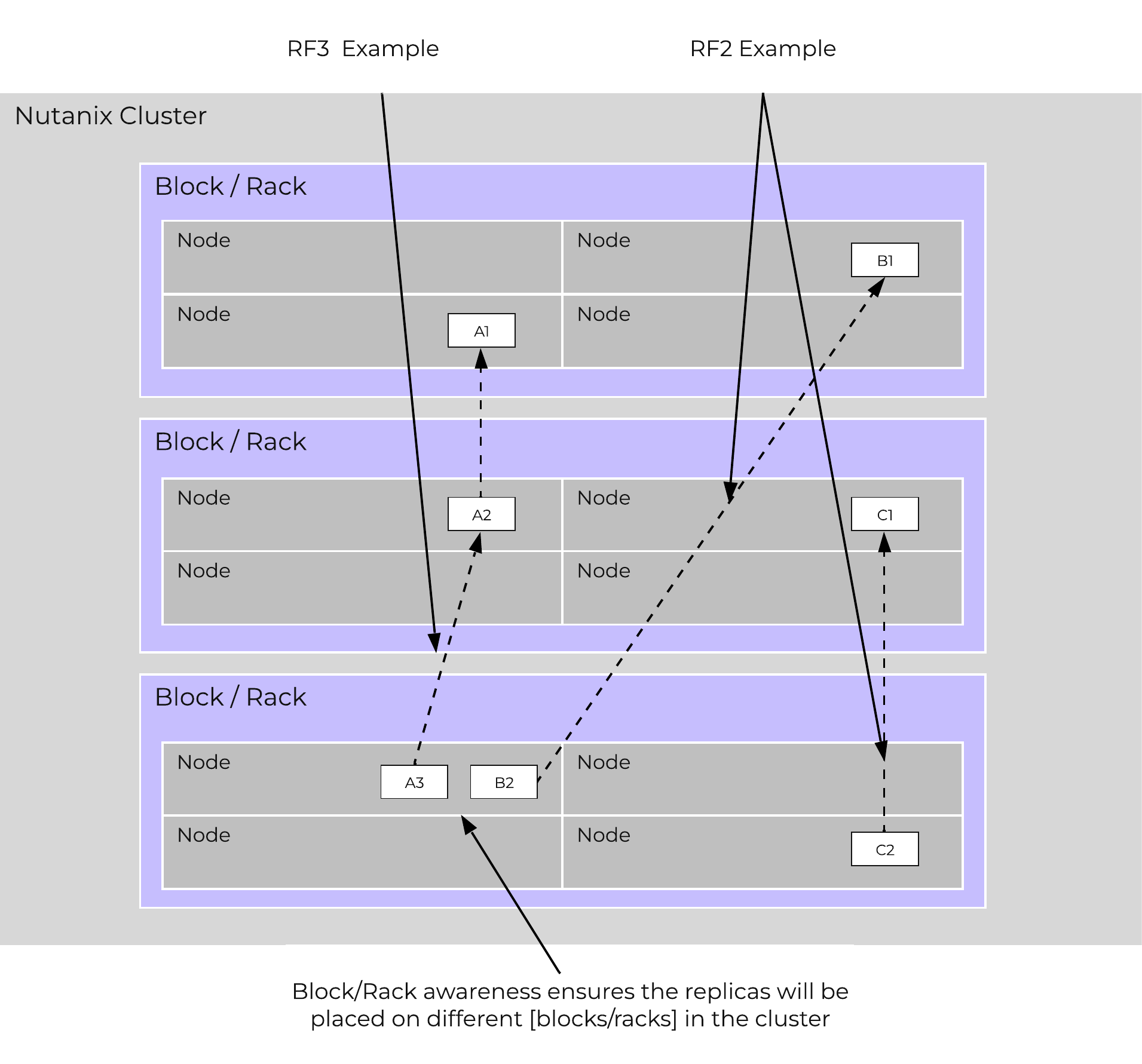 Block/Rack Aware Replica Placement
Block/Rack Aware Replica Placement
In the case of a [block/rack] failure, [block/rack] awareness will be maintained (if possible) and the data will be replicated to other [blocks/racks] within the cluster:
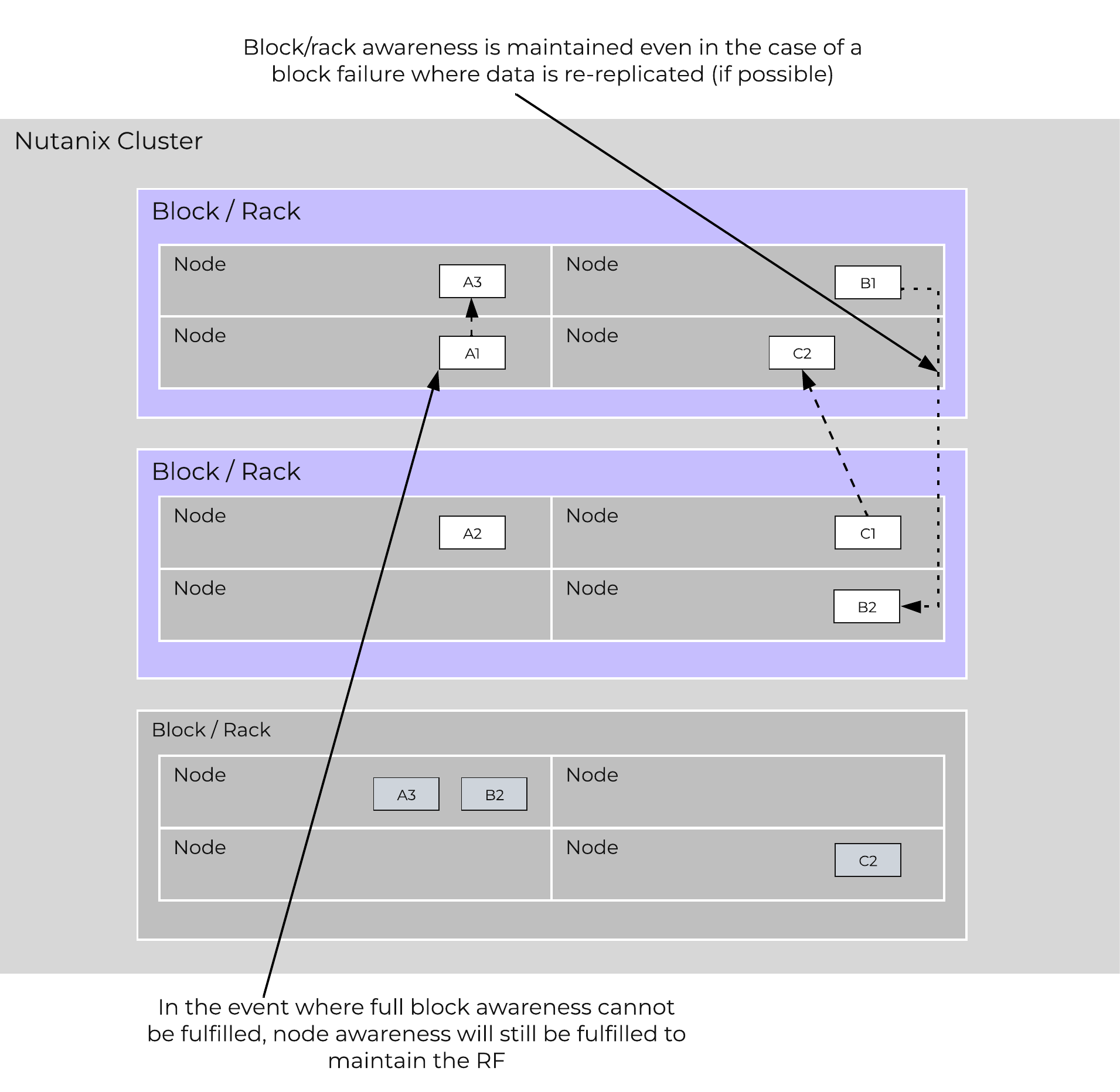 Block/Rack Failure Replica Placement
Block/Rack Failure Replica Placement
A common question is can you span a cluster across two locations (rooms, buildings, etc.) and use block / rack awareness to provide resiliency around a location failure.
While theoretically possible this is not the recommended approach. Let's first think about what we're trying to achieve with this:
If we take the first case where we're trying to achieve an RPO ~0, it is preferred to leverage synchronous or near-synchronous replication. This will provide the same RPOs with less risk.
To minimize the RTO one can leverage a metro-cluster on top of synchronous replication and handle any failures as HA events instead of doing DR recoveries.
In summary it is preferred to leverage synchronous replication / metro clustering for the following reasons:
Below we breakdown some common scenarios and the level of tolerance:
| Desired Awareness Type | FT Level | EC Enabled? | Min. Units | Simultaneous failure tolerance |
|---|---|---|---|---|
| Node | 1 | No | 3 Nodes | 1 Node |
| Node | 1 | Yes | 4 Nodes | 1 Node |
| Node | 2 | No | 5 Nodes | 2 Node |
| Node | 2 | Yes | 6 Nodes | 2 Nodes |
| Block | 1 | No | 3 Blocks | 1 Block |
| Block | 1 | Yes | 4 Blocks | 1 Block |
| Block | 2 | No | 5 Blocks | 2 Blocks |
| Block | 2 | Yes | 6 Blocks | 2 Blocks |
| Rack | 1 | No | 3 Racks | 1 Rack |
| Rack | 1 | Yes | 4 Racks | 1 Rack |
| Rack | 2 | No | 5 Racks | 2 Racks |
| Rack | 2 | Yes | 6 Racks | 2 Racks |
Block awareness operates on an opt-in (setting specifically in the Prism UI) or best-effort basis. For best-effort, when certain conditions are met (eg: minimum storage tiers per block, container replication factor setting, minimum number of blocks, free space in the storage tiers), then it will be enabled automatically. It is considered best practice to have uniform blocks to minimize any storage skew.
As mentioned in the Scalable Metadata section above, Nutanix leverages a heavily modified Cassandra platform to store metadata and other essential information. Cassandra leverages a ring-like structure and replicates to n number of peers within the ring to ensure data consistency and availability.
The following figure shows an example of the Cassandra’s ring for a 12-node cluster:
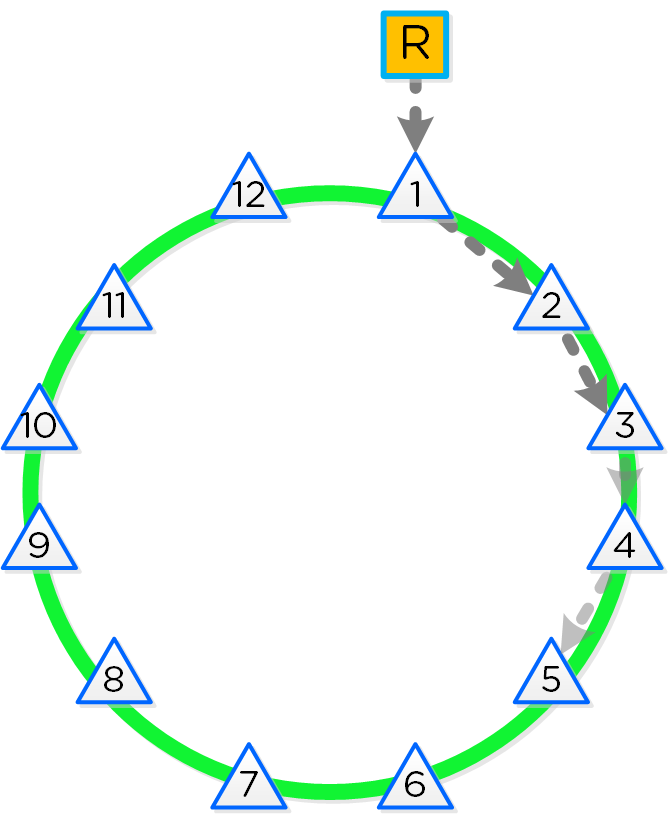 12 Node Cassandra Ring
12 Node Cassandra Ring
Cassandra peer replication iterates through nodes in a clockwise manner throughout the ring. With [block/rack] awareness, the peers are distributed among the [blocks/racks] to ensure no two peers are on the same [block/rack].
The following figure shows an example node layout translating the ring above into the [block/rack] based layout:
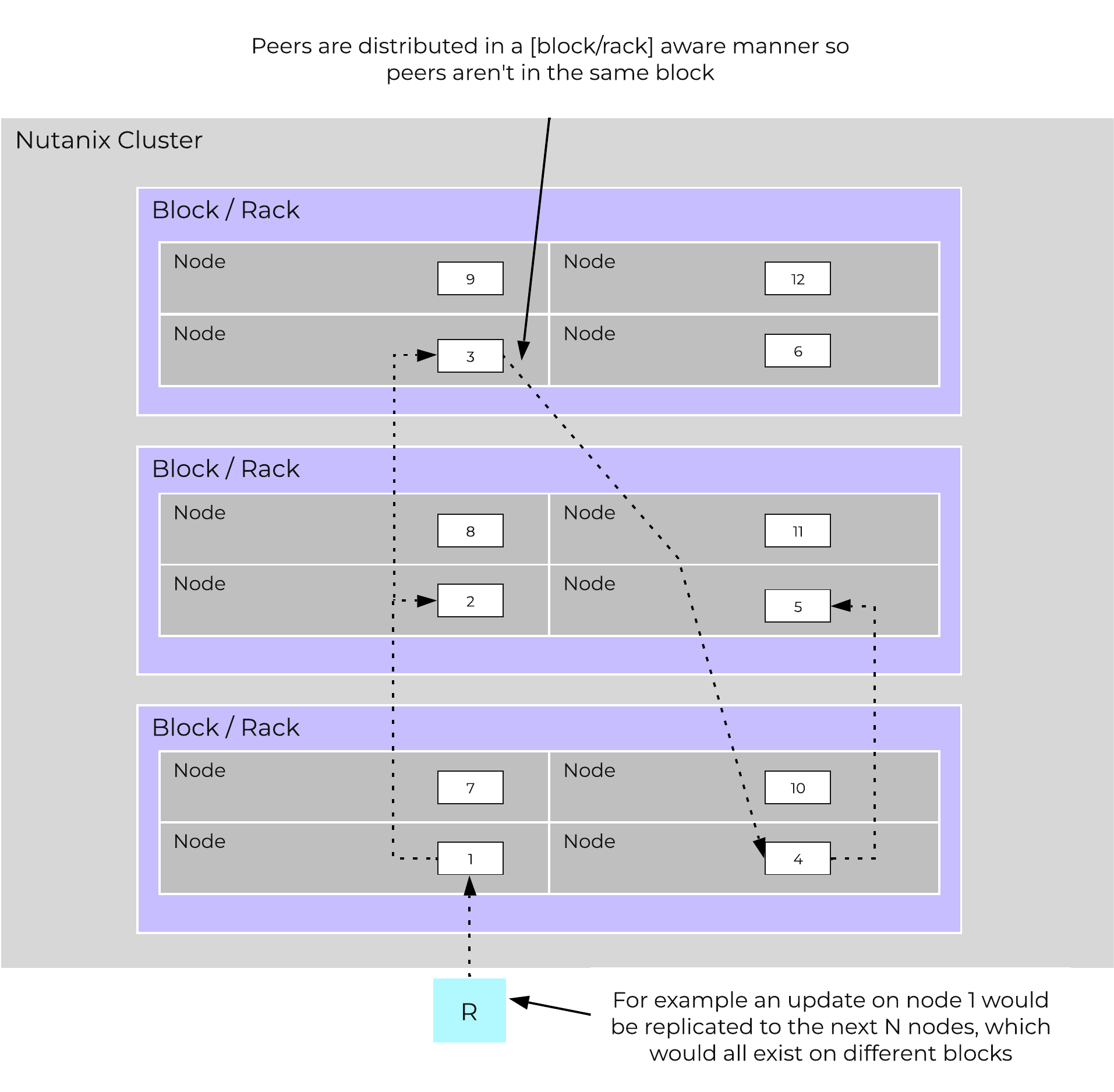 Cassandra Node Block/Rack Aware Placement
Cassandra Node Block/Rack Aware Placement
With this [block/rack]-aware nature, in the event of a [block/rack] failure there will still be at least two copies of the data (with Metadata RF3 – In larger clusters RF5 can be leveraged).
The following figure shows an example of all of the nodes replication topology to form the ring (yes – it’s a little busy):
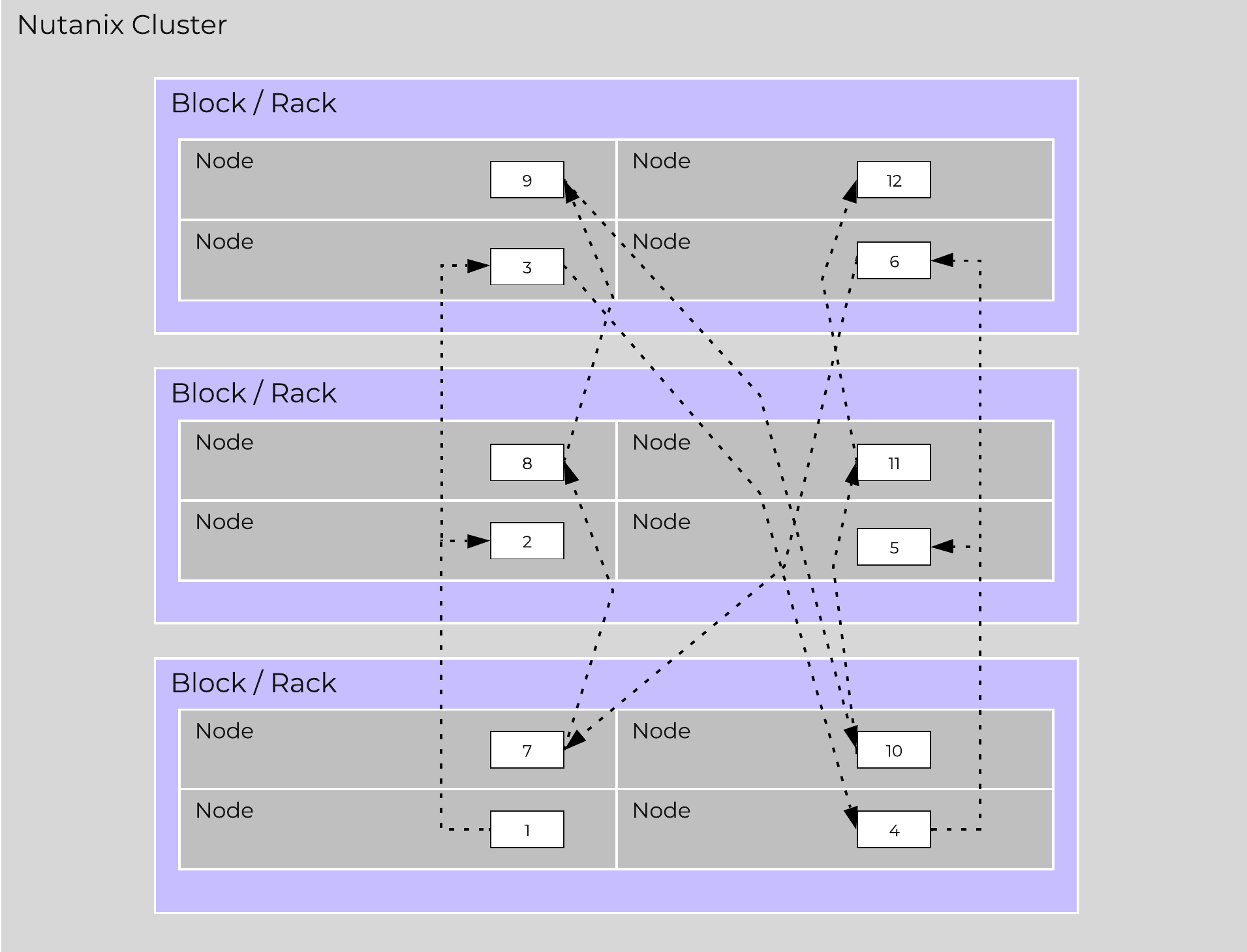 Full Cassandra Node Block/Rack Aware Placement
Full Cassandra Node Block/Rack Aware Placement
Below we breakdown some common scenarios and what level of awareness will be utilized:
Nutanix leverages Zookeeper to store essential configuration data for the cluster. This role is also distributed in a [block/rack]-aware manner to ensure availability in the case of a [block/rack] failure.
The following figure shows an example layout showing 3 Zookeeper nodes distributed in a [block/rack]-aware manner:
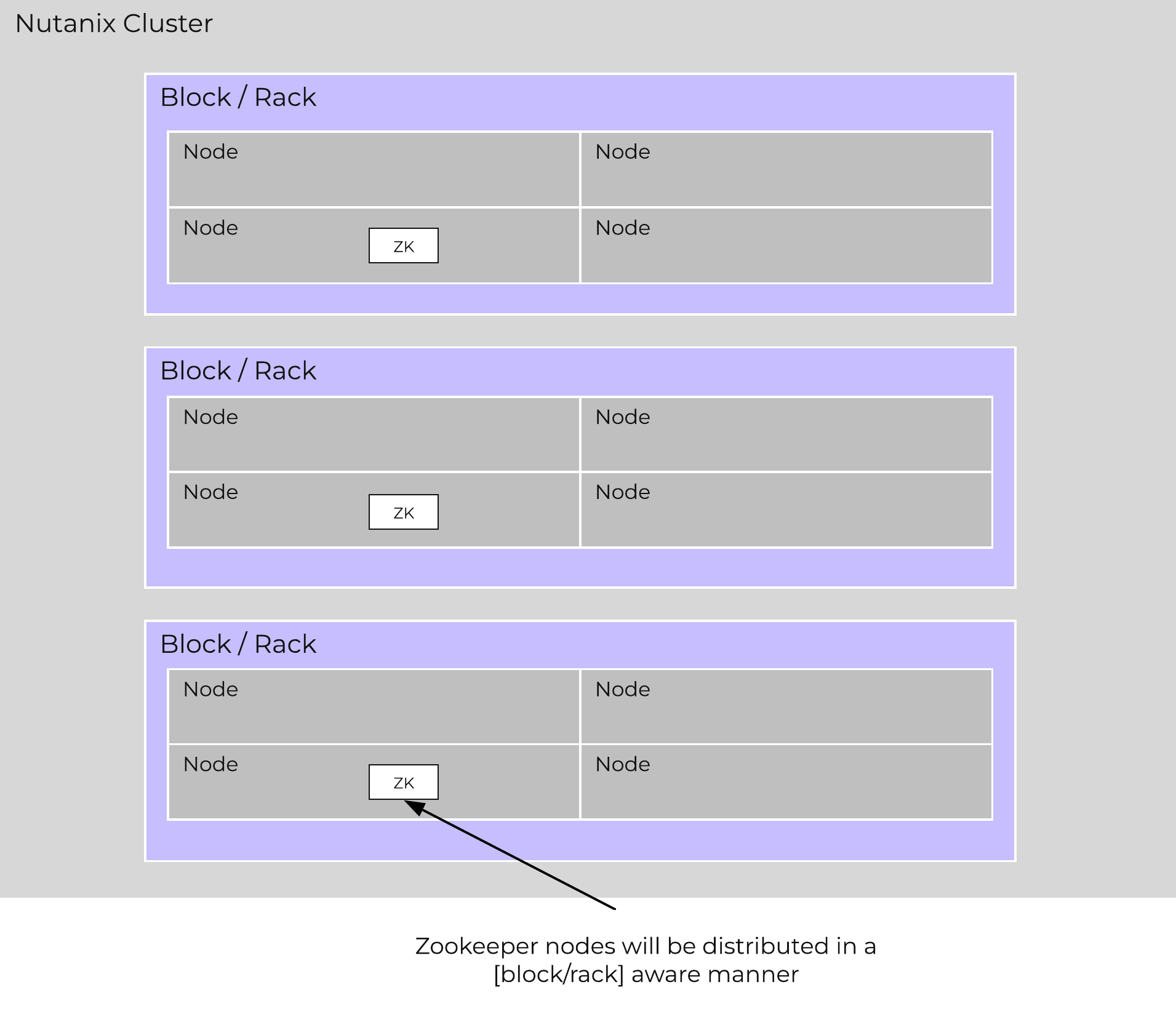 Zookeeper Block/Rack Aware Placement
Zookeeper Block/Rack Aware Placement
In the event of a [block/rack] outage, meaning one of the Zookeeper nodes will be gone, the Zookeeper role would be transferred to another node in the cluster as shown below:
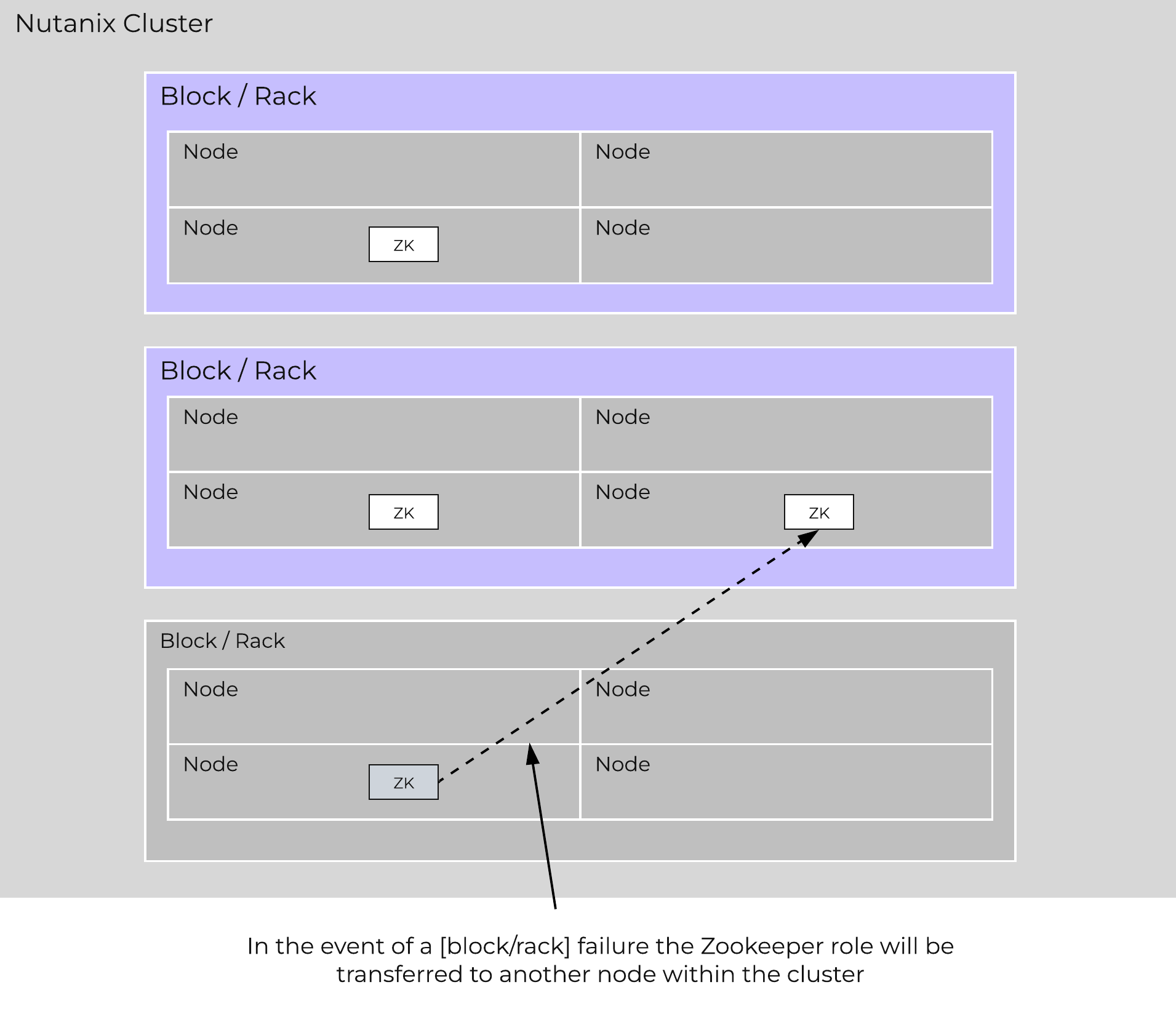 Zookeeper Placement Block/Rack Failure
Zookeeper Placement Block/Rack Failure
When the [block/rack] comes back online, the Zookeeper role would be transferred back to maintain [block/rack] awareness.
Reliability and resiliency are key, if not the most important concepts within AOS or any primary storage platform.
Contrary to traditional architectures which are built around the idea that hardware will be reliable, Nutanix takes a different approach: it expects hardware will eventually fail. By doing so, the system is designed to handle these failures in an elegant and non-disruptive manner.
NOTE: That doesn’t mean the hardware quality isn’t there, just a concept shift. The Nutanix hardware and QA teams undergo an exhaustive qualification and vetting process.
As mentioned in the prior sections metadata and data are protected using a RF which is based upon the cluster FT level. As of 5.0 supported FT levels are FT1 and FT2 which correspond to metadata RF3 and data RF2, or metadata RF5 and data RF3 respectively.
To learn more about how metadata is sharded refer to the prior ‘Scalable Metadata’ section. To learn more about how data is protected refer to the prior ‘Data protection’ section.
In a normal state, cluster data layout will look similar to the following:
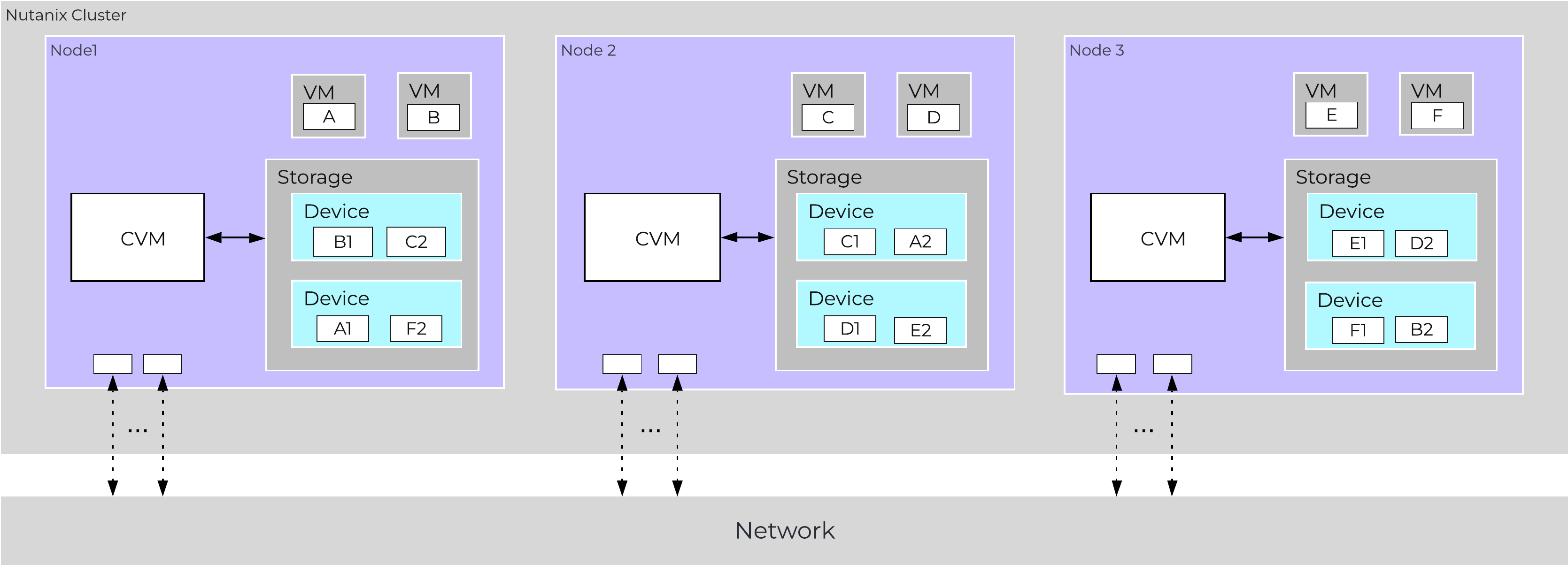 Data Path Resiliency - Normal State
Data Path Resiliency - Normal State
As you can see the VM/vDisk data has 2 or 3 copies on disk which are distributed among the nodes and associated storage devices.
By ensuring metadata and data is distributed across all nodes and all disk devices we can ensure the highest possible performance during normal data ingest and re-protection.
As data is ingested into the system its primary and replica copies will be distributed across the local and all other remote nodes. By doing so we can eliminate any potential hot spots (e.g. a node or disk performing slowly) and ensure a consistent write performance.
In the event of a disk or node failure where data must be re-protected, the full power of the cluster can be used for the rebuild. In this event the scan of metadata (to find out the data on the failed device(s) and where the replicas exist) will be distributed evenly across all CVMs. Once the data replicas have been found all healthy CVMs, disk devices (SSD+HDD), and host network uplinks can be used concurrently to rebuild the data.
For example, in a 4 node cluster where a disk fails each CVM will handle 25% of the metadata scan and data rebuild. In a 10 node cluster, each CVM will handle 10% of the metadata scan and data rebuild. In a 50 node cluster, each CVM will handle 2% of the metadata scan and data rebuild.
Key point: With Nutanix and by ensuring uniform distribution of data we can ensure consistent write performance and far superior re-protection times. This also applies to any cluster wide activity (e.g. erasure coding, compression, deduplication, etc.)
Comparing this to other solutions where HA pairs are used or a single disk holds a full copy of the data, they will face frontend performance issues if the mirrored node/disk is under duress (facing heavy IO or resource constraints).
Also, in the event of a failure where data must be re-protected, they will be limited by a single controller, a single node's disk resources and a single node's network uplinks. When terabytes of data must be re-replicated this will be severely constrained by the local node's disk and network bandwidth, increasing the time the system is in a potential data loss state if another failure occurs.
Being a distributed system, AOS is built to handle component, service, and CVM failures, which can be characterized on a few levels:
When there is an unplanned failure (in some cases we will proactively take things offline if they aren't working correctly) we begin the rebuild process immediately.
Unlike some other vendors which can, depending on the failure, wait up to 60 minutes to start rebuilding and only maintain a single copy during that period (very risky and can lead to data loss if there's any sort of failure), we are not willing to take that risk at the sacrifice of potentially higher storage utilization.
We can do this because of a) the granularity of our metadata b) choose peers for write RF dynamically (while there is a failure, all new data (e.g. new writes / overwrites) maintain their configured redundancy) and c) we can handle things coming back online during a rebuild and re-admit the data once it has been validated. In this scenario data may be "over-replicated" in which a Curator scan will kick off and remove the over-replicated copies.
A disk failure can be characterized as just that, a disk which has either been removed, encounters a failure, or one that is not responding or has I/O errors. When Stargate sees I/O errors or the device fails to respond within a certain threshold it will mark the disk offline. Once that has occurred Hades will run S.M.A.R.T. and check the status of the device. If the tests pass the disk will be marked online, if they fail it will remain offline. If Stargate marks a disk offline multiple times (currently 3 times in an hour), Hades will stop marking the disk online even if S.M.A.R.T. tests pass.
VM impact:
In the event of a disk failure, a Curator scan (MapReduce Framework) will occur immediately. It will scan the metadata (Cassandra) to find the data previously hosted on the failed disk and the nodes / disks hosting the replicas.
Once it has found that data that needs to be “re-replicated”, it will distribute the replication tasks to the nodes throughout the cluster.
During this process a Drive Self Test (DST) is started for the bad disk and SMART logs are monitored for errors.
The following figure shows an example disk failure in node 1, device 1 and re-protection on node 2 and 3:
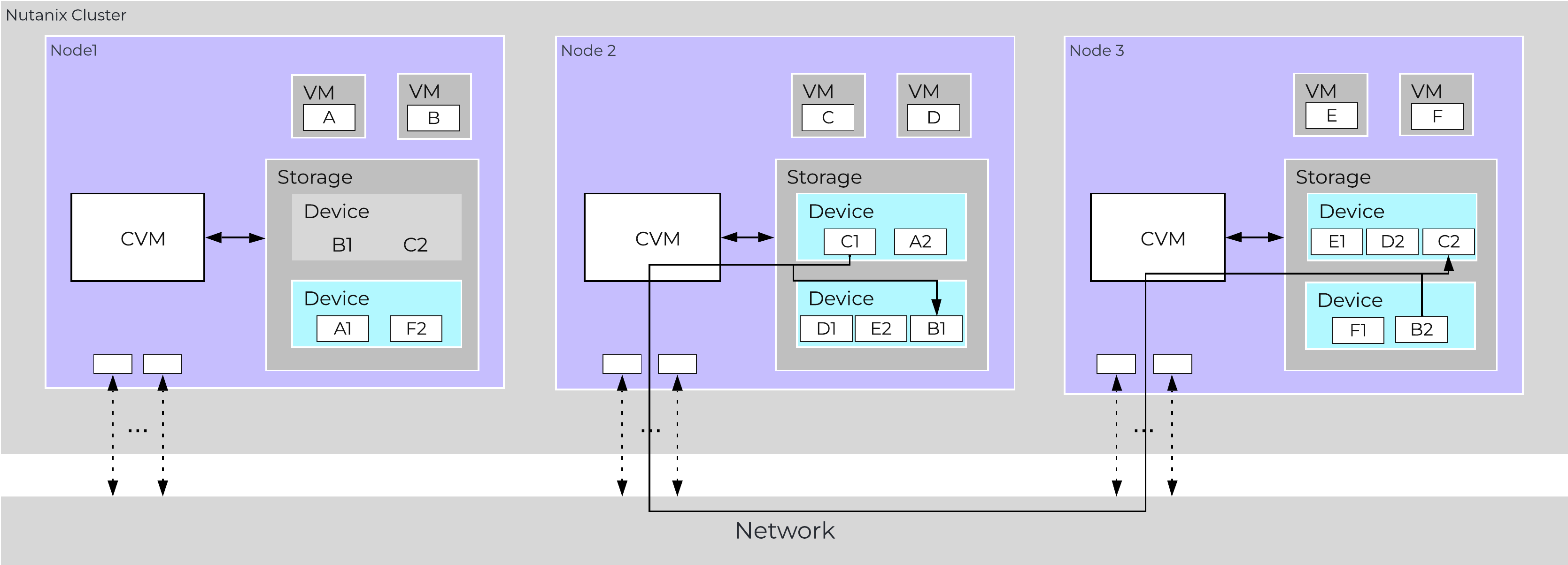 Data Path Resiliency - Node 1 Disk Failure
Data Path Resiliency - Node 1 Disk Failure
An important thing to highlight here is given how Nutanix distributes data and replicas across all nodes / CVMs / disks; all nodes / CVMs / disks will participate in the re-replication.
This substantially reduces the time required for re-protection, as the power of the full cluster can be utilized; the larger the cluster, the faster the re-protection.
VM Impact:
In the event of a node failure (node 1 shown below), a VM HA event will occur restarting the VMs on other nodes throughout the virtualization cluster. Once restarted, the VMs will continue to perform I/Os as usual which will be handled by their local CVMs.
Similar to the case of a disk failure above, a Curator scan will find the data previously hosted on the node and its respective replicas. Once the replicas are found all nodes will participate in the reprotection.
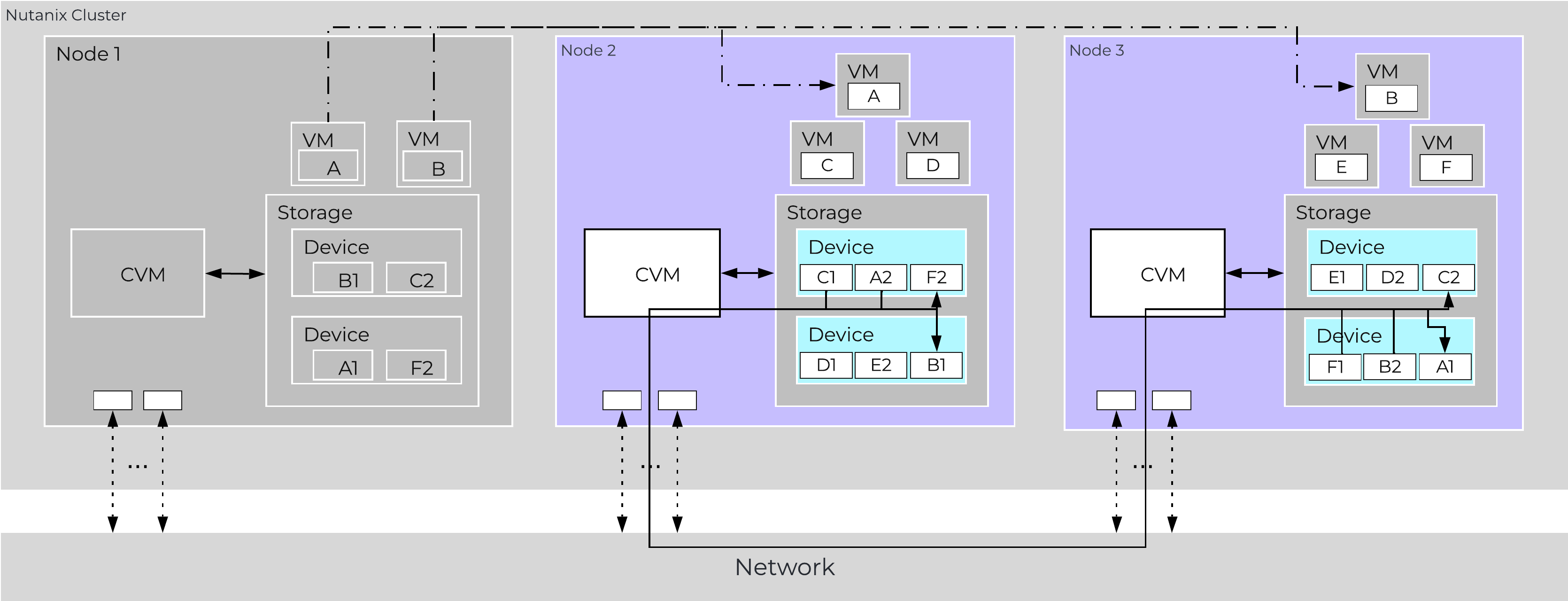 Data Path Resiliency - Node 1 Failure
Data Path Resiliency - Node 1 Failure
In the event where the node remains down for a prolonged period of time (30 minutes), the down CVM will be removed from the metadata ring. It will be joined back into the ring after it has been up and stable for a duration of time.
Data resiliency state will be shown in Prism on the dashboard page.
You can also check data resiliency state via the cli:
###### Node Statusncli cluster get-domain-fault-tolerance-status type=node###### Block Status
ncli cluster get-domain-fault-tolerance-status type=rackable_unit
These should always be up to date, however to refresh the data you can kick off a Curator partial scan.
A CVM “failure” can be characterized as a CVM power action causing the CVM to be temporarily unavailable. The system is designed to transparently handle these gracefully. In the event of a failure, I/Os will be re-directed to other CVMs within the cluster. The mechanism for this will vary by hypervisor.
The rolling upgrade process actually leverages this capability as it will upgrade one CVM at a time, iterating through the cluster.
VM impact:
In the event of a CVM “failure” the I/O which was previously being served from the down CVM, will be forwarded to other CVMs throughout the cluster. ESXi and Hyper-V handle this via a process called CVM Autopathing, which leverages HA.py (like “happy”), where it will modify the routes to forward traffic going to the internal address (192.168.5.2) to the external IP of other CVMs throughout the cluster. This enables the datastore to remain intact, just the CVM responsible for serving the I/Os is remote.
Once the local CVM comes back up and is stable, the route would be removed and the local CVM would take over all new I/Os.
In the case of AHV, iSCSI multi-pathing is leveraged where the primary path is the local CVM and the two other paths would be remote. In the event where the primary path fails, one of the other paths will become active.
Similar to Autopathing with ESXi and Hyper-V, when the local CVM comes back online, it’ll take over as the primary path.
Some refresher on terms used:
Resilient capacity is storage capacity in a cluster that can be consumed at the lowest availability/failure domain while maintaining the cluster’s ability to self-heal and recover to desired replication factor (RF) after FT failure(s) at the configured availability/failure domain. So in simple terms, Resilient Capacity = Total Cluster Capacity - Capacity needed to rebuild from FT failure(s).
Homogeneous Cluster Capacity
Non-Homogeneous Cluster Capacity
The resilient capacity in this case is 40TB and not 60TB because after losing the 40TB block, the cluster has node availability domain. At this level to maintain 2 data copies, the capacity available is 40TB which makes resilient capacity in this case to be 40TB overall.
It is recommended to keep clusters uniform and homogenous from capacity and failure domain perspective.
The resilient capacity is displayed within Prism management UI within the storage summary widget (Prism Central via the Clusters view and Prism Element via the Storage view) with a gray line. Thresholds can be set to warn end users when cluster usage is reaching resilient capacity. By default that is set to 75%.
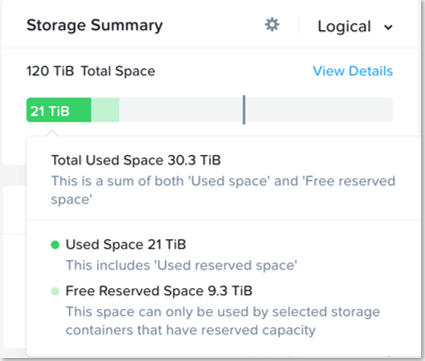
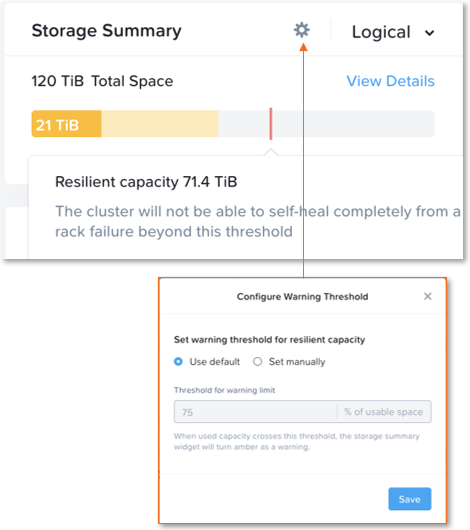
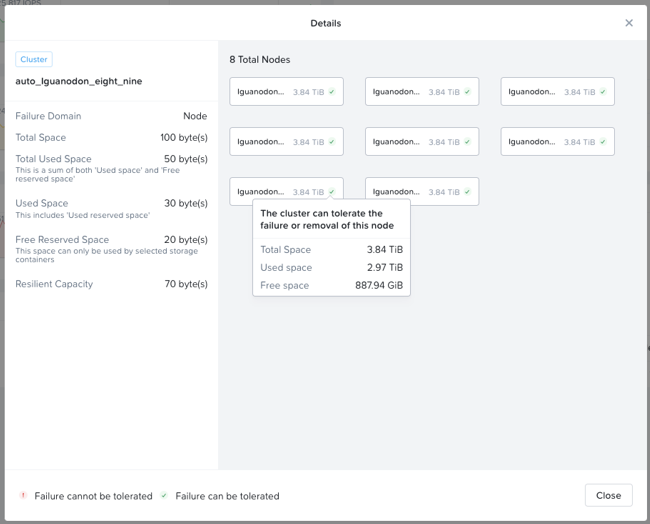
Prism can also show detailed storage utilizations on a per node basis which helps administrators understand resiliency on a per node basis. This is useful in clusters which have a skewed storage distribution.
When cluster usage is greater than resilient capacity for that cluster, the cluster might not be able to tolerate and recover from failures anymore. Cluster can possibly still recover and tolerate failure at a lower failure domain as resilient capacity is for configured failure domain. For example, a cluster with a node failure domain may still be able to self-heal and recover from a disk failure but cannot self-heal and recover from a node failure.
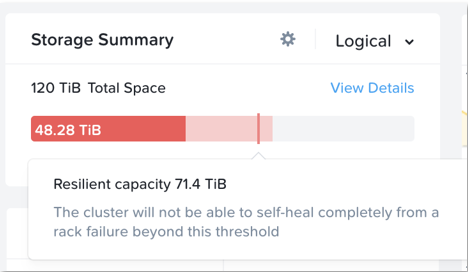
It is highly recommeded to not exceed the resilient capacity of a cluster in any circumstances to ensure proper functioning of cluster and maintain it’s ability to self-heal and recover from failures.
The Nutanix platform incorporates a wide range of storage optimization technologies that work in concert to make efficient use of available capacity for any workload. These technologies are intelligent and adaptive to workload characteristics, eliminating the need for manual configuration and fine-tuning.
The following optimizations are leveraged:
More detail on how each of these features can be found in the following sections.
The table describes which optimizations are applicable to workloads at a high-level:
| Data Transform | Best suited Application(s) | Comments |
|---|---|---|
| Erasure Coding (EC-X) | Most, Ideal for Nutanix Files/Objects | Provides higher availability with reduced overheads than traditional RF. No impact to normal write or read I/O performance. Does have some read overhead in the case of a disk / node / block failure where data must be decoded. Not suitable for workloads that are write or overwrite intensive, such as VDI |
| Inline Compression |
All | No impact to random I/O, helps increase storage tier utilization. Benefits large or sequential I/O performance by reducing data to replicate and read from disk. |
| Offline Compression |
None | Given inline compression will compress only large or sequential writes inline and do random or small I/Os post-process, that should be used instead. |
| Dedupe | Full Clones in VDI, Persistent Desktops, P2V/V2V, Hyper-V (ODX) | Greater overall efficiency for data which wasn't cloned or created using efficient AOS clones |
The Nutanix platform leverages a replication factor (RF) for data protection and availability. This method provides the highest degree of availability because it does not require reading from more than one storage location or data re-computation on failure. However, this does come at the cost of storage resources as full copies are required.
To provide a balance between availability while reducing the amount of storage required, AOS provides the ability to encode data using erasure codes (EC).
Similar to the concept of RAID (levels 4, 5, 6, etc.) where parity is calculated, EC encodes a strip of data blocks on different nodes and calculates parity. In the event of a host and/or disk failure, the parity can be leveraged to calculate any missing data blocks (decoding). In the case of AOS, the data block is an extent group. Based upon the read nature of the data (read cold vs. read hot), the system will determine placement of the blocks in the strip.
For data that is read cold, we will prefer to distribute the data blocks from the same vDisk across nodes to form the strip (same-vDisk strip). This simplifies garbage collection (GC) as the full strip can be removed in the event the vDisk is deleted. For read hot data we will prefer to keep the vDisk data blocks local to the node and compose the strip with data from different vDisks (cross-vDisk strip). This minimizes remote reads as the local vDisk’s data blocks can be local and other VMs/vDisks can compose the other data blocks in the strip. In the event a read cold strip becomes hot, AOS will try to recompute the strip and localize the data blocks.
The number of data and parity blocks in a strip is configurable based upon the desired failures to tolerate. The configuration is commonly referred to as the number of <number of data blocks>/<number of parity blocks>.
For example, “RF2 like” availability (N+1) could consist of 3 or 4 data blocks and 1 parity block in a strip (3/1 or 4/1). “RF3 like” availability (N+2) could consist of 3 or 4 data blocks and 2 parity blocks in a strip (3/2 or 4/2). The default strip sizes are 4/1 for RF2 like availability and 4/2 for RF3 like availability. These can be overriden using nCLI is desired.
ncli container [create/edit] ... erasure-code=<N>/<K>
where N is number of data blocks and K is number of parity blocks
EC can place data and parity blocks in a block aware manner. If there are enough blocks (strip size (k+n) + 1) available in the cluster AOS will look to build block aware EC strips.
The expected overhead can be calculated as <# parity blocks> / <# data blocks>. For example, a 4/1 strip has a 25% overhead or 1.25X compared to the 2X of RF2. A 4/2 strip has a 50% overhead or 1.5X compared to the 3X of RF3.
The following table characterizes the encoded strip sizes and example overheads:
| FT1 (RF2 equiv.) | FT2 (RF3 equiv.) | |||
|---|---|---|---|---|
| Cluster Size (nodes) |
EC Strip Size (data/parity blocks) |
EC Overhead (vs. 2X of RF2) |
EC Strip Size (data/parity) |
EC Overhead (vs. 3X of RF3) |
| 4 | 2/1 | 1.5X | N/A | N/A |
| 5 | 3/1 | 1.33X | N/A | N/A |
| 6 | 4/1 | 1.25X | 2/2 | 2X |
| 7 | 4/1 | 1.25X | 3/2 | 1.6X |
| 8+ | 4/1 | 1.25X | 4/2 | 1.5X |
It is always recommended to have a cluster size which has at least 1 more node (or block for block aware data / parity placement) than the combined strip size (data + parity) to allow for rebuilding of the strips in the event of a node or block failure. This eliminates any computation overhead on reads once the strips have been rebuilt (automated via Curator). For example, a 4/1 strip should have at least 6 nodes in the cluster for a node aware EC strip or 6 blocks for a block aware EC strip. The previous table follows this best practice.
The encoding is done post-process and leverages the Curator MapReduce framework for task distribution. Since this is a post-process framework, the traditional write I/O path is unaffected.
A normal environment using RF would look like the following:
 Typical AOS RF Data Layout
Typical AOS RF Data Layout
In this scenario, we have RF2 data whose primary copies are local and replicas are distributed to other nodes throughout the cluster.
When a Curator full scan runs, it will find eligible extent groups which are available to become encoded. Eligible extent groups must be “write-cold” meaning they haven’t been written to for awhile. This is controlled with the following Curator Gflag: curator_erasure_code_threshold_seconds. After the eligible candidates are found, the encoding tasks will be distributed and throttled via Chronos.
The following figure shows an example 3/1 strip:
 AOS Encoded Strip - Pre-savings
AOS Encoded Strip - Pre-savings
Once the data has been successfully encoded (strips and parity calculation), the replica extent groups are then removed.
The following figure shows the environment after EC has run with the storage savings:
 AOS Encoded Strip - Post-savings
AOS Encoded Strip - Post-savings
Nutanix also supports inline erasure coding, which can be enabled on containers using nCLI. This feature encodes data without waiting for it to become write-cold. In inline erasure coding, the erasure coded strips are created on the same vDisk data by default. There is also an option to create strips from cross vdisks, preserving data locality if that is desired. Inline erasure coding is only recommended for workloads that do not require data locality or do not perform numerous overwrites. Nutanix Objects is a good example of such a workload and has inline erasure coding turned on by default. This works because the Objects architecture handles overwrites as new writes, meaning there is no downside to erasure coding data immediately.
Note that when inline erasure coding is enabled, a post-process policy is available as a fallback. This provides optionality so that if the data ingest or frontend data operations are too high, it can fall back to post-process.
Nutanix is a platform of enterprise services, one such service is Nutanix Unified Storage (NUS) supporting our File and Object services. Starting in AOS 7.3 and later to support the growing storage demands of File and Object deployments on Nutanix, erasure coding can now support up to 12/2 strip sizes. This is only available on dedicated clusters running NUS. Increasing the strip width allows the platform to store a greater ratio of data to parity blocks, improving efficiency and enabling more optimal distribution across a larger number of nodes. This increased strip width also results in better capacity utilization, especially in clusters with high density requirements, such as file and object clusters.
Erasure Coding pairs perfectly with inline compression which will add to the storage savings.
For a visual explanation, you can watch the following video: LINK
The Nutanix Capacity Optimization Engine (COE) is responsible for performing data transformations to increase data efficiency on disk. Currently compression is one of the key features of the COE to perform data optimization. AOS provides both inline and post-process compression to best suit the customer’s needs and type of data. Inline compression is enabled by default when a storage container is created.
Inline compression will compress sequential streams of data or large I/O sizes (>64K) when written to the Extent Store (SSD + HDD). This includes data draining from OpLog as well as sequential data skipping it.
The OpLog will compress all incoming writes >4K that show good compression (Gflag: vdisk_distributed_oplog_enable_compression). This will allow for a more efficient utilization of the OpLog capacity and help drive sustained performance.
When drained from OpLog to the Extent Store the data will be decompressed, aligned and then re-compressed at a 32K aligned unit size.
This feature is on by default and no user configuration is necessary.
Offline compression will initially write the data as normal (in an un-compressed state) and then leverage the Curator framework to compress the data cluster wide. When inline compression is enabled but the I/Os are random in nature, the data will be written un-compressed in the OpLog, coalesced, and then compressed in memory before being written to the Extent Store.
Nutanix leverages LZ4 and LZ4HC for data compression. Normal data will be compressed using LZ4, which provides a very good blend between compression and performance. For cold data, LZ4HC will be leveraged to provide an improved compression ratio.
Cold data is characterized into two main categories:
The following figure shows an example of how inline compression interacts with the AOS write I/O path:
 Inline Compression I/O Path
Inline Compression I/O Path
Almost always use inline compression (compression delay = 0) as it will only compress larger / sequential writes and not impact random write performance.
This will also increase the usable size of the SSD tier increasing effective performance and allowing more data to sit in the SSD tier. Also, for larger or sequential data that is written and compressed inline, the replication for RF will be shipping the compressed data, further increasing performance since it is sending less data across the wire.
Inline compression also pairs perfectly with erasure coding.
For offline compression, all new write I/O is written in an un-compressed state and follows the normal AOS I/O path. After the compression delay (configurable) is met, the data is eligible to become compressed. Compression can occur anywhere in the Extent Store. Offline compression uses the Curator MapReduce framework and all nodes will perform compression tasks. Compression tasks will be throttled by Chronos.
The following figure shows an example of how offline compression interacts with the AOS write I/O path:
 Offline Compression I/O Path
Offline Compression I/O Path
For read I/O, the data is first decompressed in memory and then the I/O is served.
You can view the current compression rates via Prism on the Storage > Dashboard page.
For a visual explanation, you can watch the following video: LINK
The Elastic Dedupe Engine is a software-based feature of AOS which allows for data deduplication in the capacity (Extent Store) tiers. Streams of data are fingerprinted during ingest at a 16KB granularity (Controlled by: stargate_dedup_fingerprint) within a 1MB extent. Prior to AOS 5.11, AOS used only SHA-1 hash to fingerprint and identify candidates for dedupe. AOS now uses logical checksums to select candidates for dedupe. This fingerprint is only done on data ingest and is then stored persistently as part of the written block’s metadata.
Contrary to traditional approaches which utilize background scans requiring the data to be re-read, Nutanix performs the fingerprint inline on ingest. For duplicate data that can be deduplicated in the capacity tier, the data does not need to be scanned or re-read, essentially duplicate copies can be removed.
To make the metadata overhead more efficient, fingerprint refcounts are monitored to track dedupability. Fingerprints with low refcounts will be discarded to minimize the metadata overhead. To minimize fragmentation full extents will be preferred for deduplication.
Use deduplication on your base images (you can manually fingerprint them using vdisk_manipulator) to take advantage of the unified cache.
Fingerprinting is done during data ingest of data with an I/O size of 64K or greater (initial I/O or when draining from OpLog). AOS then looks at hashes/fingerprints of each 16KB chunk within a 1MB extent and if it finds duplicates for more than 40% of chunks, it dedupes the entire extent. That resulted in many dedupe extents with reference count of 1 (no other duplicates) within the 1MB extent from the remaining 60% of extent, that ended up using metadata.
With AOS 6.6, the algorithm was further enhanced such that within a 1MB extent, only chunks that have duplicates will be marked for deduplication instead of entire extent reducing the metadata required. With AOS 6.6, changes were also made with the way dedupe metadata was stored. Before AOS 6.6, dedupe metadata was stored in a top level vdisk block map which resulted in dedupe metadata to be copied when snapshots were taken. This resulted in a metadata bloat. With AOS 6.6, that metadata is now stored in extent group id map which is a level lower than vdisk block map. Now when snapshots are taken of the vdisk, it does not result in copying of dedupe metadata and prevents metadata bloat. Once the fingerprintng is done, a background process will remove the duplicate data using the AOS MapReduce framework (Curator). For data that is being read, the data will be pulled into the AOS Unified Cache which is a multi-tier/pool cache. Any subsequent requests for data having the same fingerprint will be pulled directly from the cache. To learn more about the Unified Cache and pool structure, please refer to the Unified Cache sub-section in the I/O path overview.
The following figure shows an example of how the Elastic Dedupe Engine interacts with the AOS I/O path:
 EDE I/O Path
EDE I/O Path
You can view the current deduplication rates via Prism on the Storage > Dashboard page.
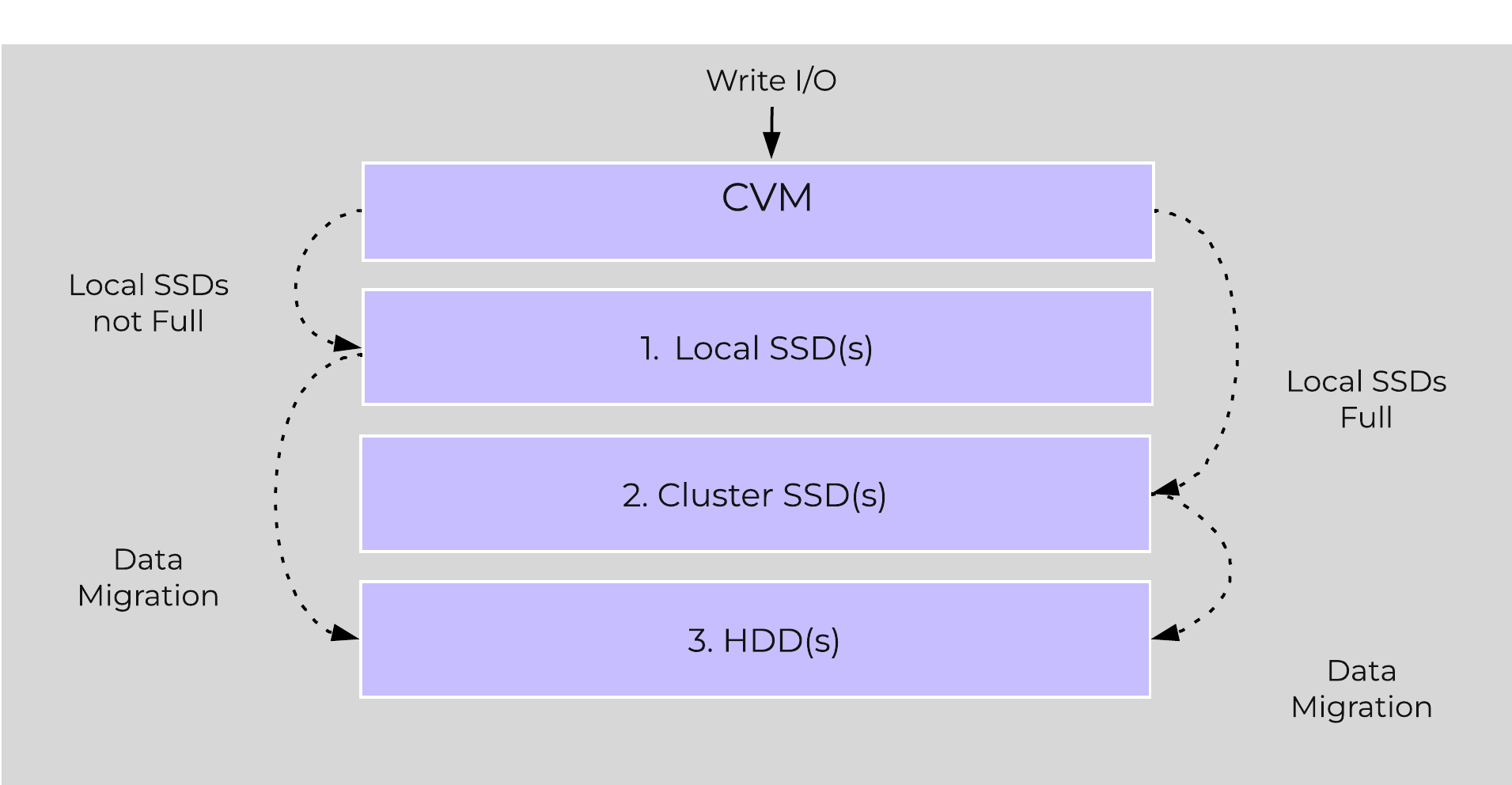
The Disk Balancing section below talks about how storage capacity was pooled among all nodes in a Nutanix cluster and that ILM would be used to keep hot data local. A similar concept applies to disk tiering, in which the cluster’s SSD and HDD tiers are cluster-wide and AOS ILM is responsible for triggering data movement events. A local node’s SSD tier is always the highest priority tier for all I/O generated by VMs running on that node, however all of the cluster’s SSD resources are made available to all nodes within the cluster. The SSD tier will always offer the highest performance and is a very important thing to manage for hybrid arrays.
The tier prioritization can be classified at a high-level by the following:
 AOS Tier Prioritization
AOS Tier Prioritization
Specific types of resources (e.g. SSD, HDD, etc.) are pooled together and form a cluster wide storage tier. This means that any node within the cluster can leverage the full tier capacity, regardless if it is local or not.
The following figure shows a high level example of what this pooled tiering looks like:
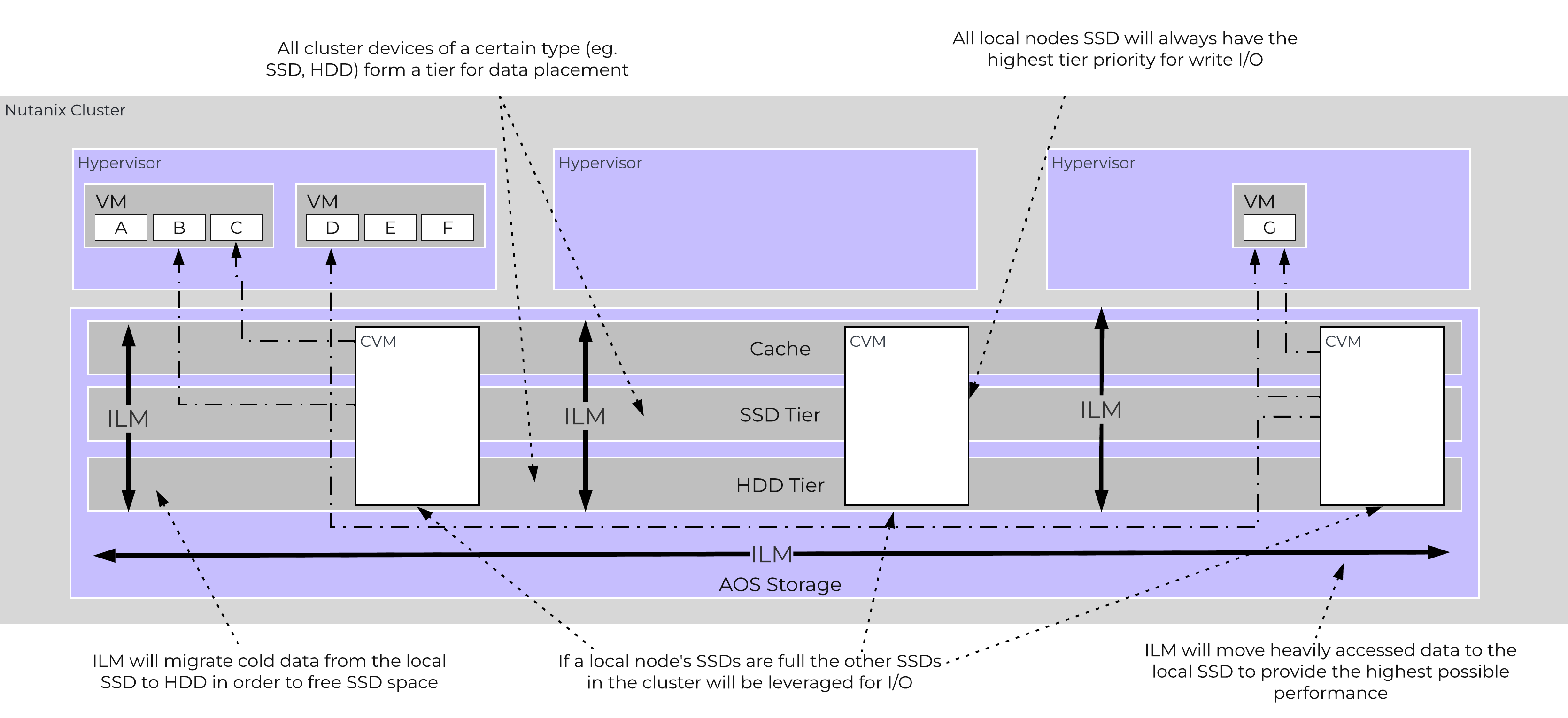 AOS Cluster-wide Tiering
AOS Cluster-wide Tiering
A common question is what happens when a local node’s SSD becomes full? As mentioned in the Disk Balancing section, a key concept is trying to keep uniform utilization of devices within disk tiers. In the case where a local node’s SSD utilization is high, disk balancing will kick in to move the coldest data on the local SSDs to the other SSDs throughout the cluster. This will free up space on the local SSD to allow the local node to write to SSD locally instead of going over the network. A key point to mention is that all CVMs and SSDs are used for this remote I/O to eliminate any potential bottlenecks and remediate some of the hit by performing I/O over the network.
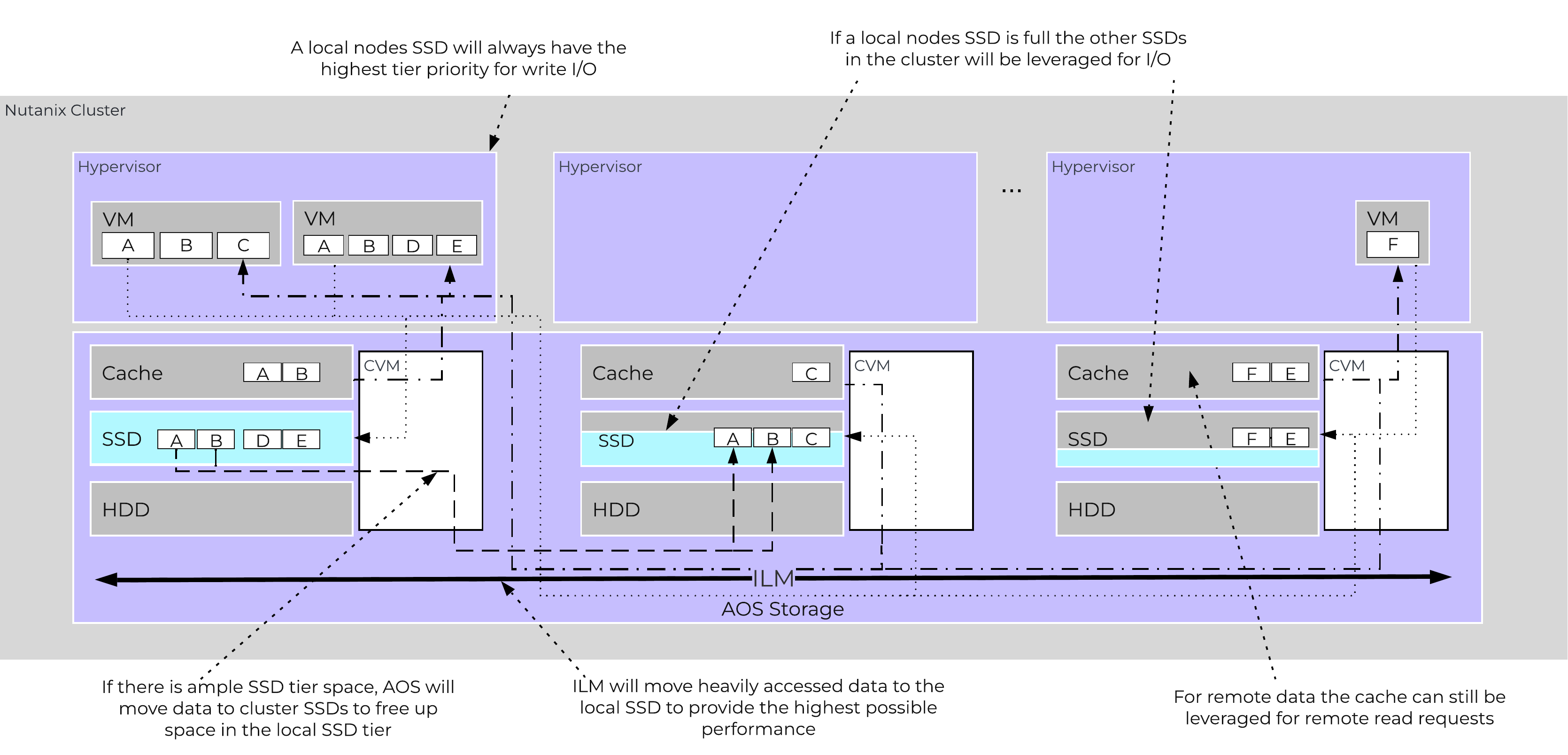 AOS Cluster-wide Tier Balancing
AOS Cluster-wide Tier Balancing
The other case is when the overall tier utilization breaches a specific threshold [curator_tier_usage_ilm_threshold_percent (Default=75)] where AOS ILM will kick in and as part of a Curator job will down-migrate data from the SSD tier to the HDD tier. This will bring utilization within the threshold mentioned above or free up space by the following amount [curator_tier_free_up_percent_by_ilm (Default=15)], whichever is greater. The data for down-migration is chosen using last access time. In the case where the SSD tier utilization is 95%, 20% of the data in the SSD tier will be moved to the HDD tier (95% –> 75%).
However, if the utilization was 80%, only 15% of the data would be moved to the HDD tier using the minimum tier free up amount.
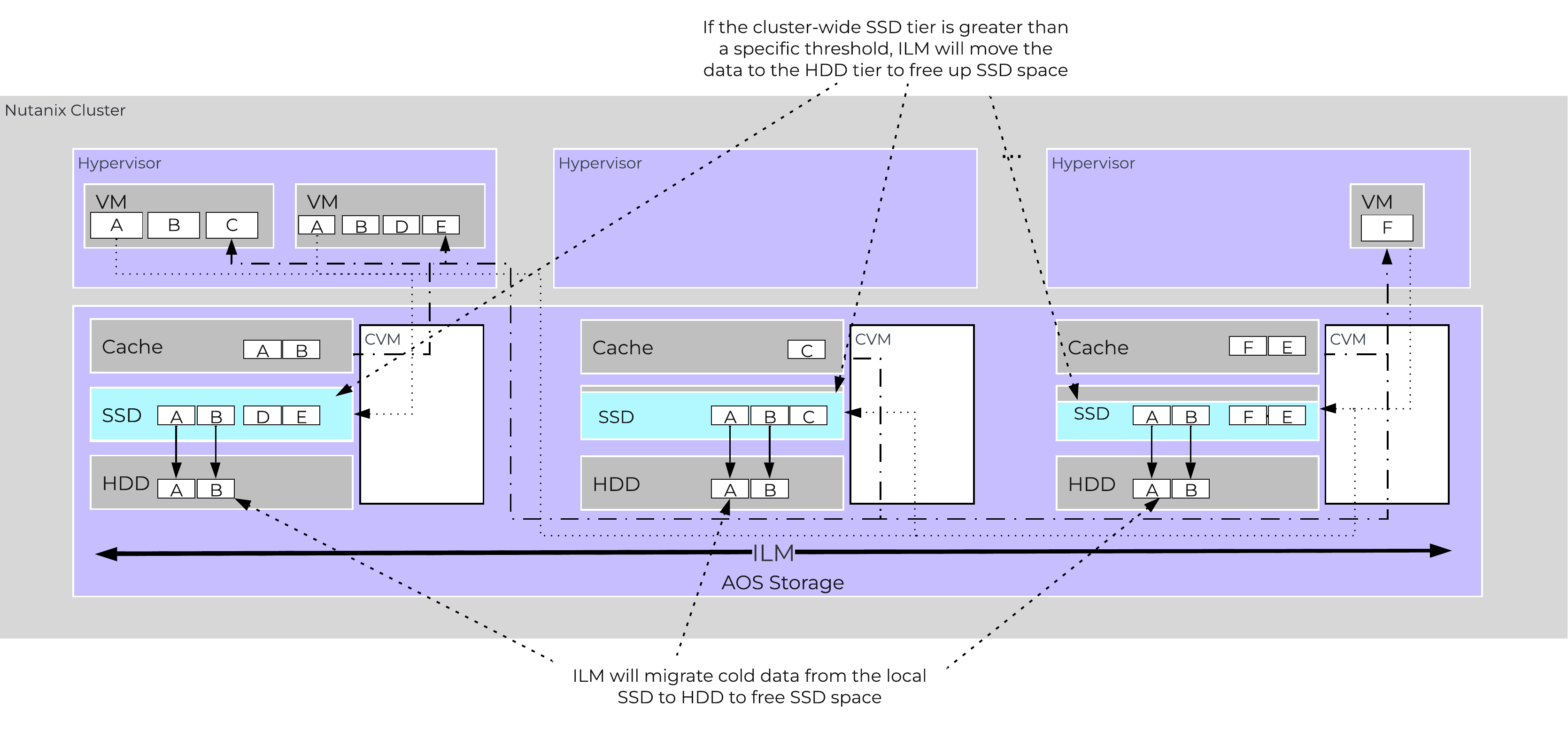 AOS Tier ILM
AOS Tier ILM
AOS ILM will constantly monitor the I/O patterns and (down/up) migrate data as necessary as well as bring the hottest data local regardless of tier. The logic for up-migration (or horizontal) follows the same as that defined for egroup locality: “3 touches for random or 10 touches for sequential within a 10 minute window where multiple reads every 10 second sampling count as a single touch”.
For a visual explanation, you can watch the following video: LINK
AOS is designed to be a very dynamic platform which can react to various workloads as well as allow heterogeneous node types: compute heavy (3155, 9151, etc.) and storage heavy (8150, etc.) to be mixed in a single cluster. Ensuring uniform distribution of data is an important item when mixing nodes with larger storage capacities. AOS has a native feature, called disk balancing, which is used to ensure uniform distribution of data throughout the cluster. Disk balancing works on a node’s utilization of its local storage capacity and is integrated with AOS ILM. Its goal is to keep utilization uniform among nodes once the utilization has breached a certain threshold.
NOTE: Disk balancing jobs are handled by Curator which has different priority queues for primary I/O (UVM I/O) and background I/O (e.g. disk balancing). This is done to ensure disk balancing or any other background activity doesn’t impact front-end latency / performance. In this cases the job’s tasks will be given to Chronos who will throttle / control the execution of the tasks. Also, movement is done within the same tier for disk balancing. For example, if data is skewed in the HDD tier, it can be moved amongst nodes in the same tier.
The following figure shows an example of a mixed cluster (3060 + 8150) in an “unbalanced” state:
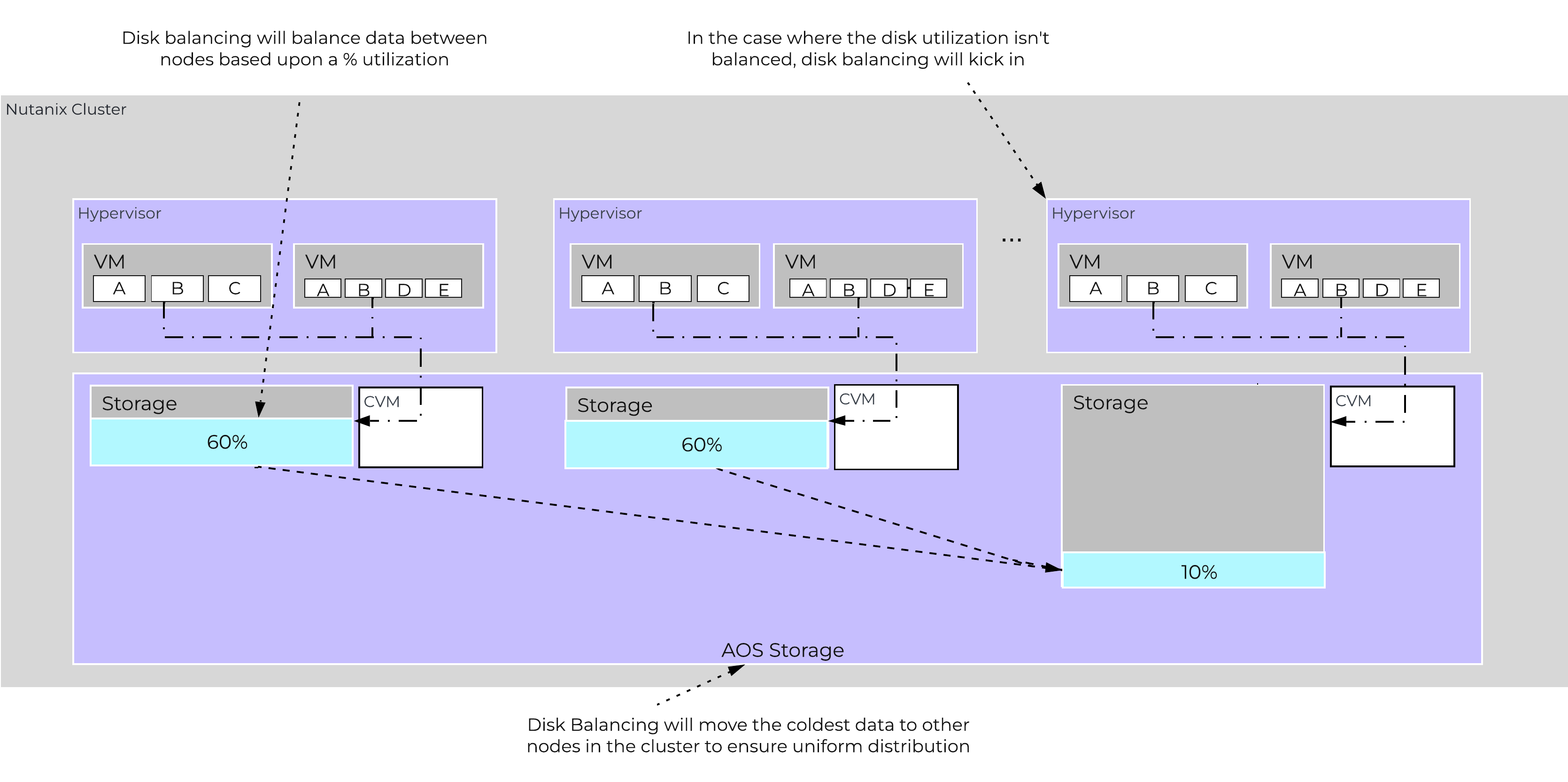 Disk Balancing - Unbalanced State
Disk Balancing - Unbalanced State
Disk balancing leverages the AOS Curator framework and is run as a scheduled process as well as when a threshold has been breached (e.g., local node capacity utilization > n %). In the case where the data is not balanced, Curator will determine which data needs to be moved and will distribute the tasks to nodes in the cluster. In the case where the node types are homogeneous (e.g., 3060), utilization should be fairly uniform. However, if there are certain VMs running on a node which are writing much more data than others, this can result in a skew in the per node capacity utilization. In this case, disk balancing would run and move the coldest data on that node to other nodes in the cluster. In the case where the node types are heterogeneous (e.g., 3060 + 8150/55/70), or where a node may be used in a “storage only” mode (not running any VMs), there will likely be a requirement to move data.
The following figure shows an example the mixed cluster after disk balancing has been run in a “balanced” state:
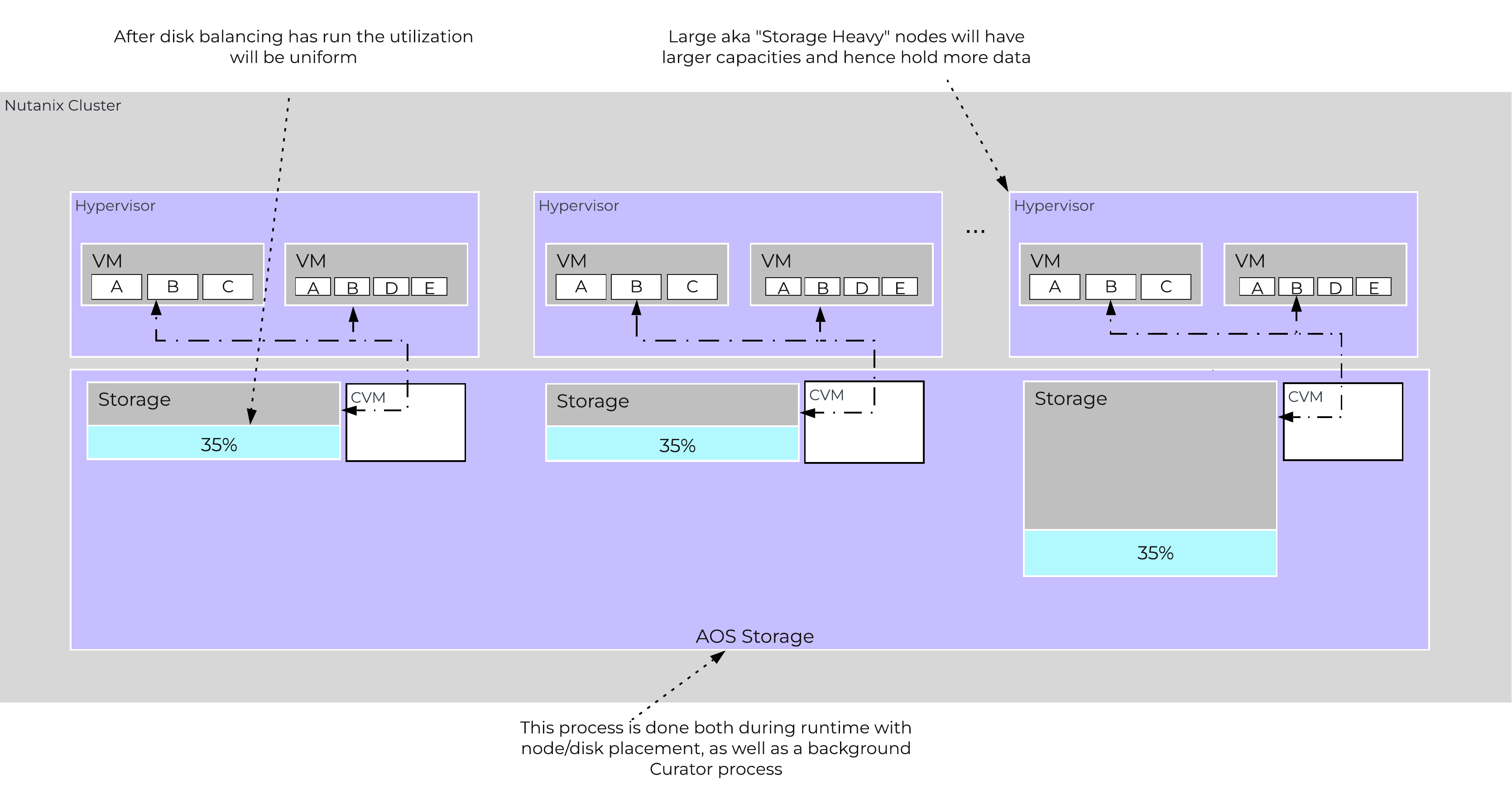 Disk Balancing - Balanced State
Disk Balancing - Balanced State
In some scenarios, customers might run some nodes in a “storage-only” state where only the CVM will run on the node whose primary purpose is bulk storage capacity. In this case, the full node’s memory can be added to the CVM to provide a much larger read cache.
The following figure shows an example of how a storage only node would look in a mixed cluster with disk balancing moving data to it from the active VM nodes:
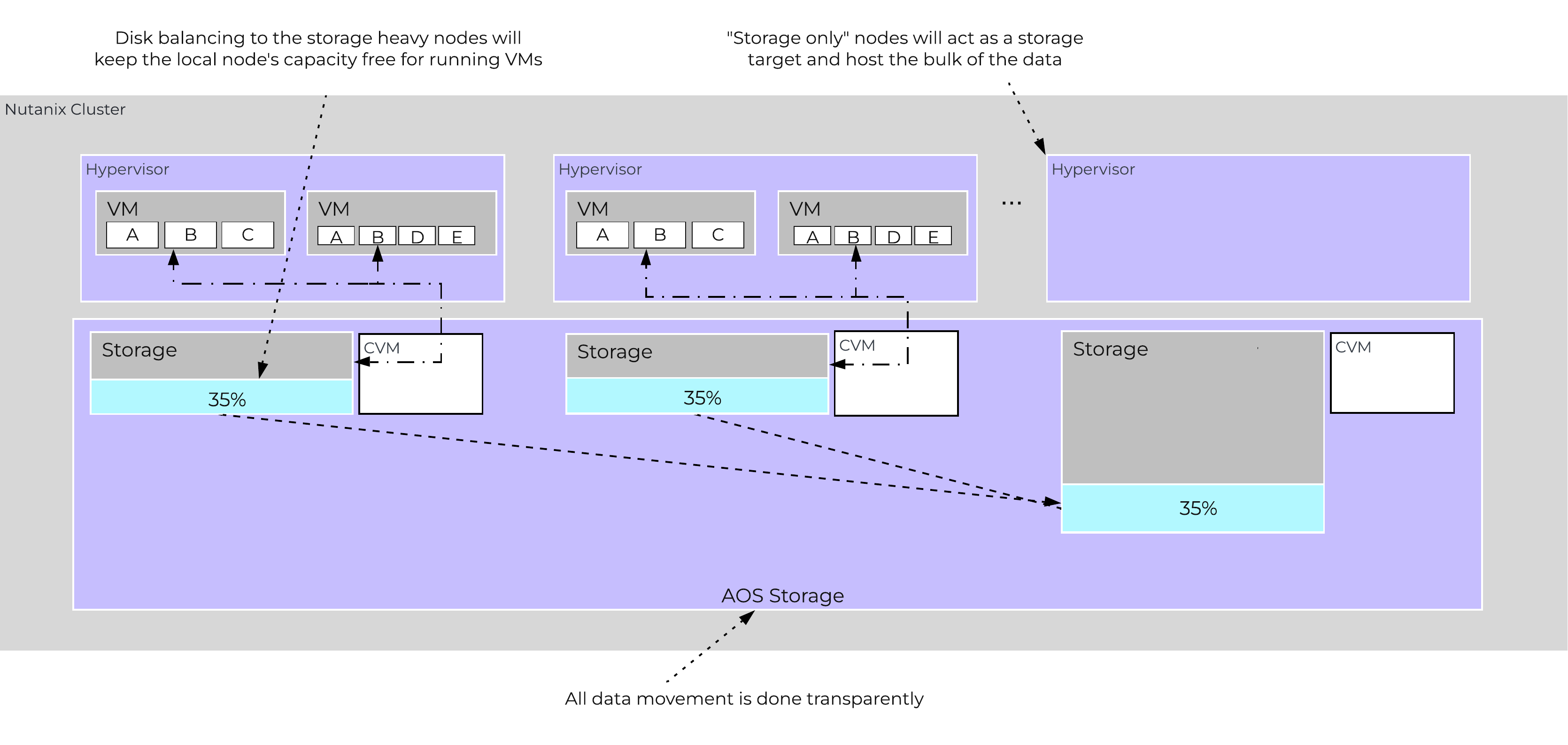 Disk Balancing - Storage Only Node
Disk Balancing - Storage Only Node
For a visual explanation, you can watch the following video: LINK
AOS provides native support for offloaded snapshots and clones which can be leveraged via VAAI, ODX, ncli, REST, Prism, etc. Both the snapshots and clones leverage the redirect-on-write algorithm which is the most effective and efficient. As explained in the Data Structure section above, a virtual machine consists of files (vmdk/vhdx) which are vDisks on the Nutanix platform.
A vDisk is composed of extents which are logically contiguous chunks of data, which are stored within extent groups which are physically contiguous data stored as files on the storage devices. When a snapshot or clone is taken, the base vDisk is marked immutable and another vDisk is created as read/write. At this point, both vDisks have the same block map, which is a metadata mapping of the vDisk to its corresponding extents. Contrary to traditional approaches which require traversal of the snapshot chain (which can add read latency), each vDisk has its own block map. This eliminates any of the overhead normally seen by large snapshot chain depths and allows you to take continuous snapshots without any performance impact.
The following figure shows an example of how this works when a snapshot is taken (source: NTAP):
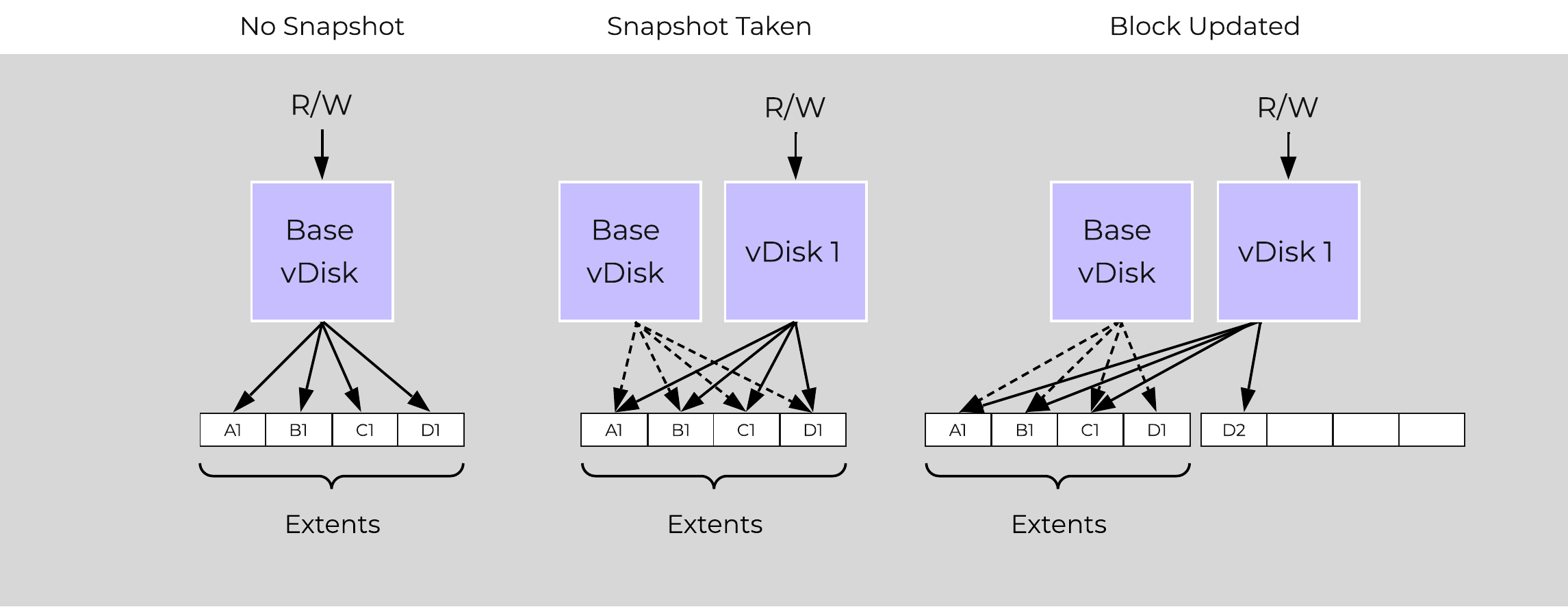 Example Snapshot Block Map
Example Snapshot Block Map
The same method applies when a snapshot or clone of a previously snapped or cloned vDisk is performed:
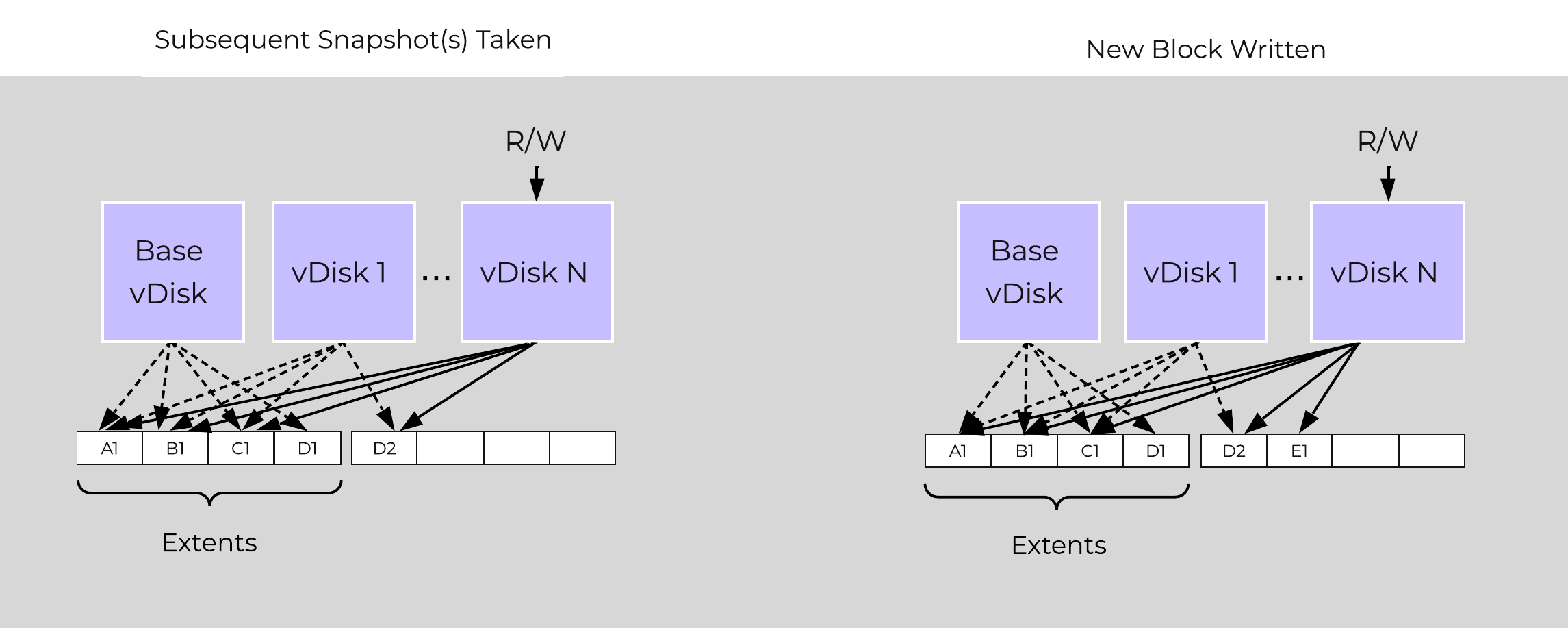 Multi-snap Block Map and New Write
Multi-snap Block Map and New Write
The same methods are used for both snapshots and/or clones of a VM or vDisk(s). When a VM or vDisk is cloned, the current block map is locked and the clones are created. These updates are metadata only, so no I/O actually takes place. The same method applies for clones of clones; essentially the previously cloned VM acts as the “Base vDisk” and upon cloning, that block map is locked and two “clones” are created: one for the VM being cloned and another for the new clone. There is no imposed limit on the maximum number of clones.
They both inherit the prior block map and any new writes/updates would take place on their individual block maps.
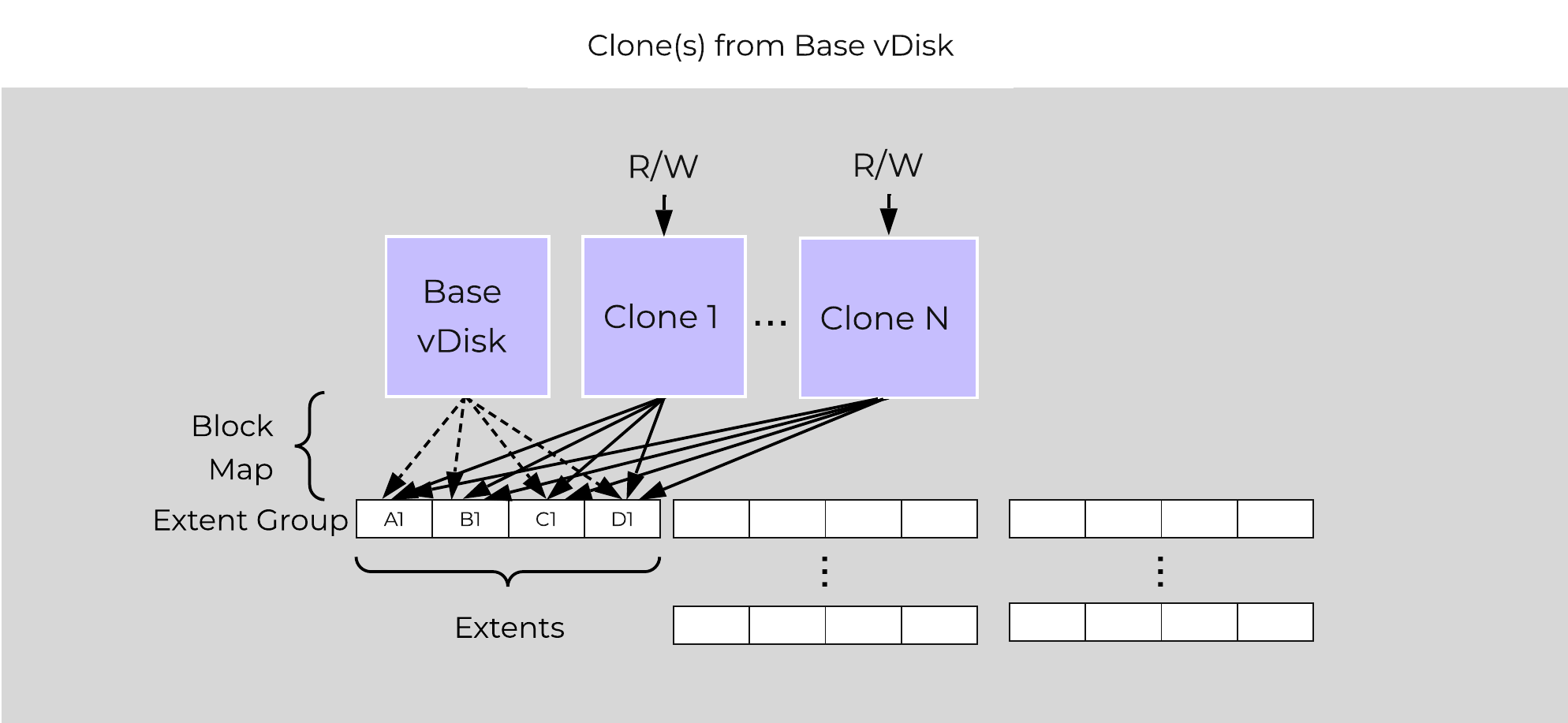 Multi-Clone Block Maps
Multi-Clone Block Maps
As mentioned previously, each VM/vDisk has its own individual block map. So in the above example, all of the clones from the base VM would now own their block map and any write/update would occur there.
In the event of an overwrite the data will go to a new extent / extent group. For example, if data exists at offset o1 in extent e1 that was being overwritten, Stargate would create a new extent e2 and track that the new data was written in extent e2 at offset o2. The Vblock map tracks this down to the byte level.
The following figure shows an example of what this looks like:
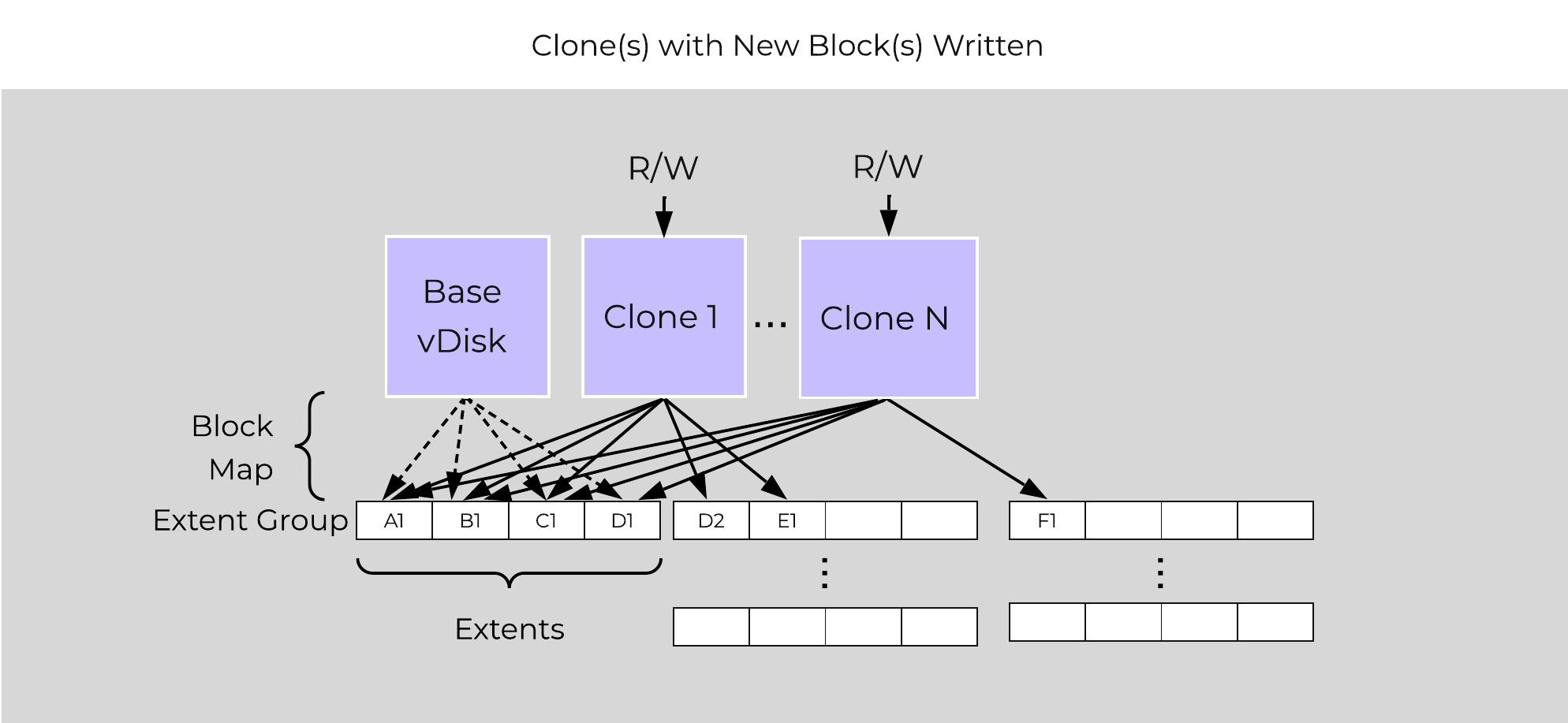 Clone Block Maps - New Write
Clone Block Maps - New Write
Any subsequent clones or snapshots of a VM/vDisk would cause the original block map to be locked and would create a new one for R/W access.
The Nutanix platform does not leverage any backplane for inter-node communication and only relies on a standard 10GbE network. All storage I/O for VMs running on a Nutanix node is handled by the hypervisor on a dedicated private network. The I/O request will be handled by the hypervisor, which will then forward the request to the private IP on the local CVM. The CVM will then perform the remote replication with other Nutanix nodes using its external IP over the public 10GbE network. For all read requests, these will be served completely locally in most cases and never touch the 10GbE network. This means that the only traffic touching the public 10GbE network will be AOS remote replication traffic and VM network I/O. There will, however, be cases where the CVM will forward requests to other CVMs in the cluster in the case of a CVM being down or data being remote. Also, cluster-wide tasks, such as disk balancing, will temporarily generate I/O on the 10GbE network.
The following figure shows an example of how the VM’s I/O path interacts with the private and public 10GbE network:
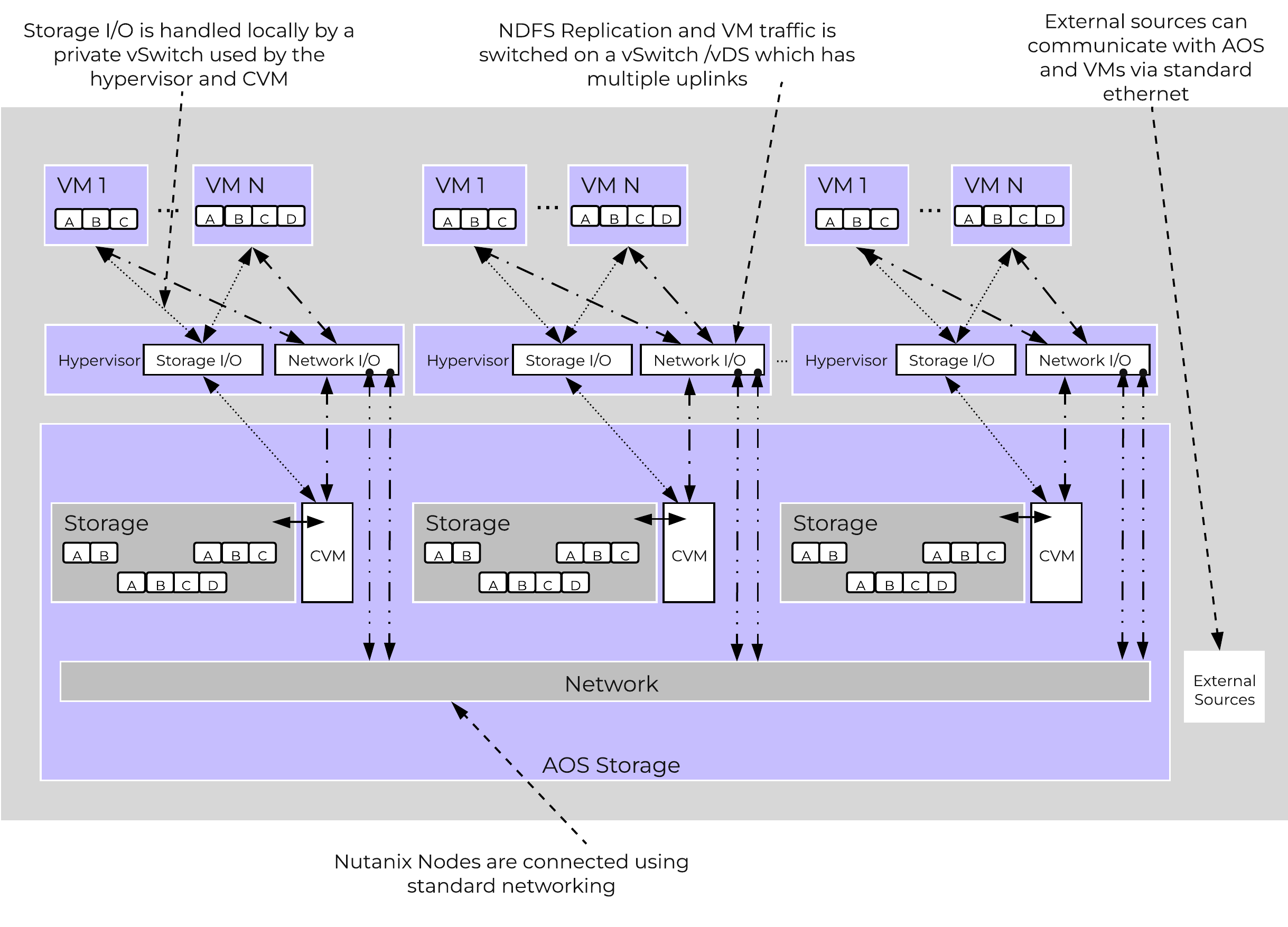 AOS Networking
AOS Networking
Being a converged (compute+storage) platform, I/O and data locality are critical to cluster and VM performance with Nutanix. As explained above in the I/O path, all read/write IOs are served by the local Controller VM (CVM) which is on each hypervisor adjacent to normal VMs. A VM’s data is served locally from the CVM and sits on local disks under the CVM’s control. When a VM is moved from one hypervisor node to another (or during a HA event), the newly migrated VM’s data will be served by the now local CVM. When reading old data (stored on the now remote node/CVM), the I/O will be forwarded by the local CVM to the remote CVM. All write I/Os will occur locally right away. AOS will detect the I/Os are occurring from a different node and will migrate the data locally in the background, allowing for all read I/Os to now be served locally. The data will only be migrated on a read as to not flood the network.
Data locality occurs in two main flavors:
The following figure shows an example of how data will “follow” the VM as it moves between hypervisor nodes:
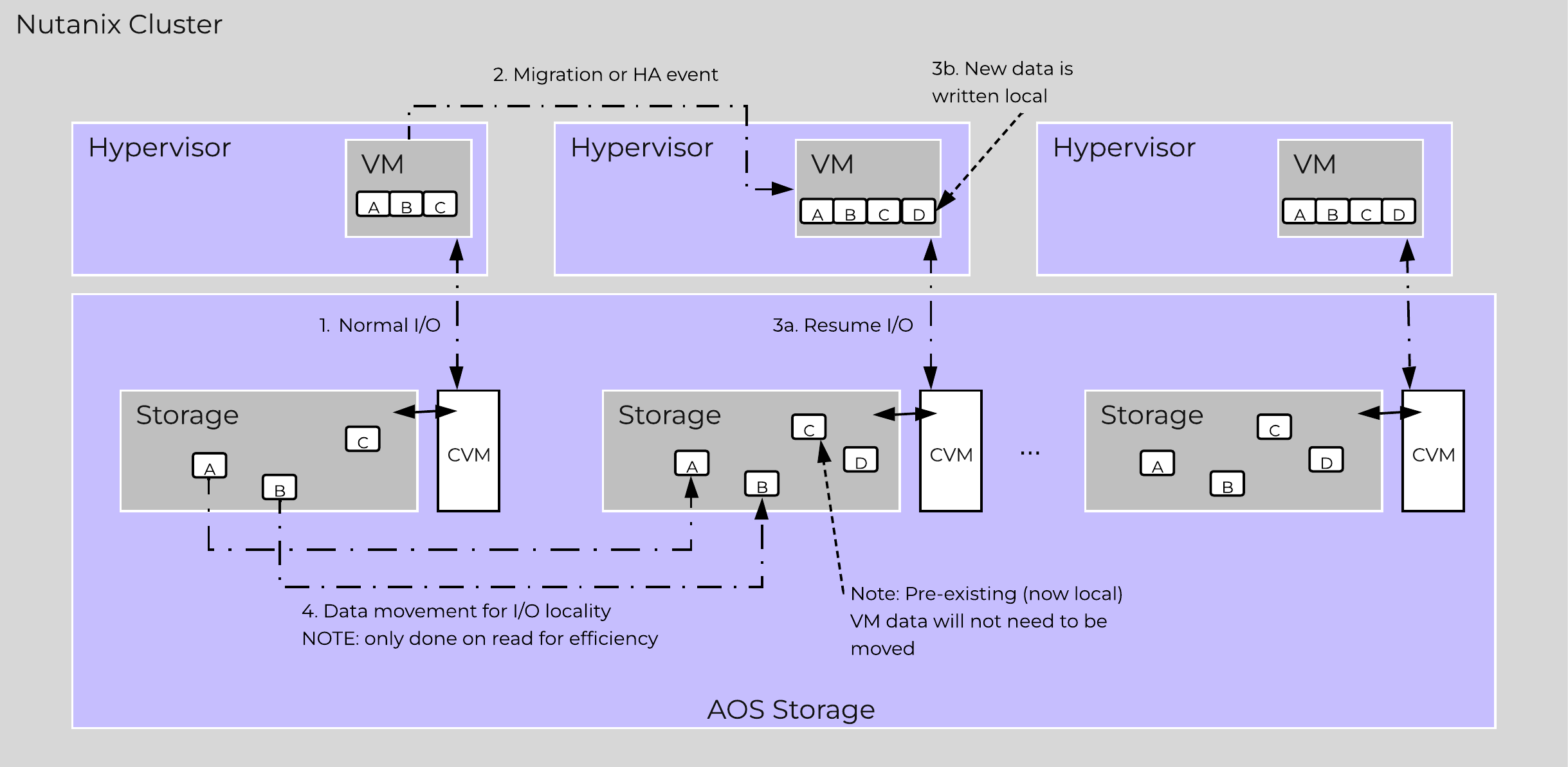 Data Locality
Data Locality
Cache locality occurs in real time and will be determined based upon vDisk ownership. When a vDisk / VM moves from one node to another the "ownership" of those vDisk(s) will transfer to the now local CVM. Once the ownership has transferred the data can be cached locally in the Unified Cache. In the interim the cache will be wherever the ownership is held (the now remote host). The previously hosting Stargate will relinquish the vDisk token when it sees remote I/Os for 300+ seconds at which it will then be taken by the local Stargate. Cache coherence is enforced as ownership is required to cache the vDisk data.
Egroup locality is a sampled operation and an extent group will be migrated when the following occurs: "3 touches for random or 10 touches for sequential within a 10 minute window where multiple reads every 10 second sampling count as a single touch".
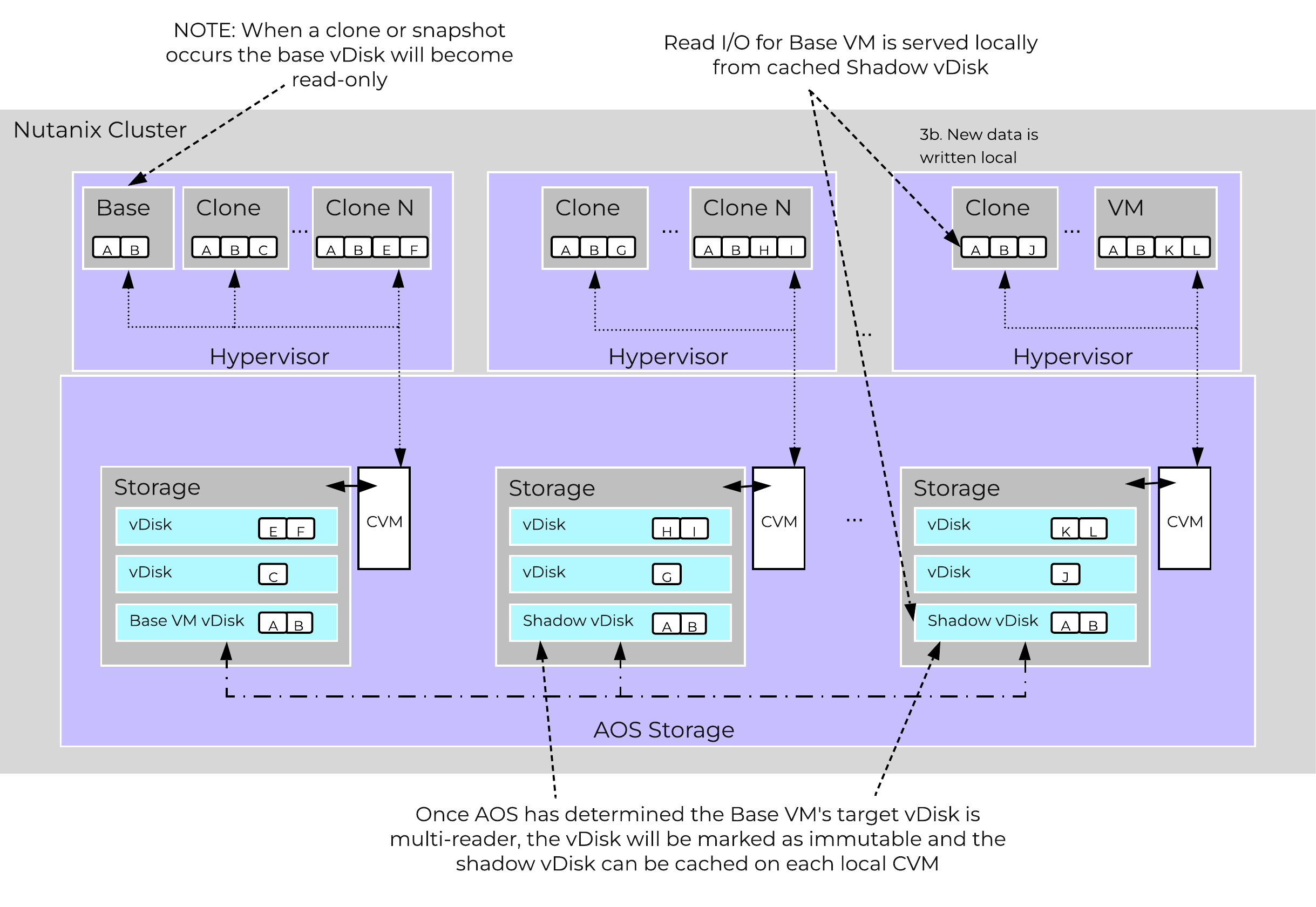
AOS Storage has a feature called ‘Shadow Clones’, which allows for distributed caching of particular vDisks or VM data which is in a ‘multi-reader’ scenario. A great example of this is during a VDI deployment many ‘linked clones’ will be forwarding read requests to a central master or ‘Base VM’. In the case of Omnissa Horizon (formerly Horizon View), this is called the replica disk and is read by all linked clones, and in XenDesktop, this is called the MCS Master VM. This will also work in any scenario which may be a multi-reader scenario (e.g., deployment servers, repositories, etc.). Data or I/O locality is critical for the highest possible VM performance and a key struct of AOS.
With Shadow Clones, AOS will monitor vDisk access trends similar to what it does for data locality. However, in the case there are requests occurring from more than two remote CVMs (as well as the local CVM), and all of the requests are read I/O, the vDisk will be marked as immutable. Once the disk has been marked as immutable, the vDisk can then be cached locally by each CVM making read requests to it (aka Shadow Clones of the base vDisk). This will allow VMs on each node to read the Base VM’s vDisk locally. In the case of VDI, this means the replica disk can be cached by each node and all read requests for the base will be served locally. NOTE: The data will only be migrated on a read as to not flood the network and allow for efficient cache utilization. In the case where the Base VM is modified, the Shadow Clones will be dropped and the process will start over. Shadow clones are enabled by default and can be enabled/disabled using the following NCLI command: ncli cluster edit-params enable-shadow-clones=<true/false>.
The following figure shows an example of how Shadow Clones work and allow for distributed caching:
 Shadow Clones
Shadow Clones
The Nutanix platform monitors storage at multiple layers throughout the stack, ranging from the VM/Guest OS all the way down to the physical disk devices. Knowing the various tiers and how these relate is important whenever monitoring the solution and allows you to get full visibility of how the ops relate. The following figure shows the various layers of where operations are monitored and the relative granularity which are explained below:
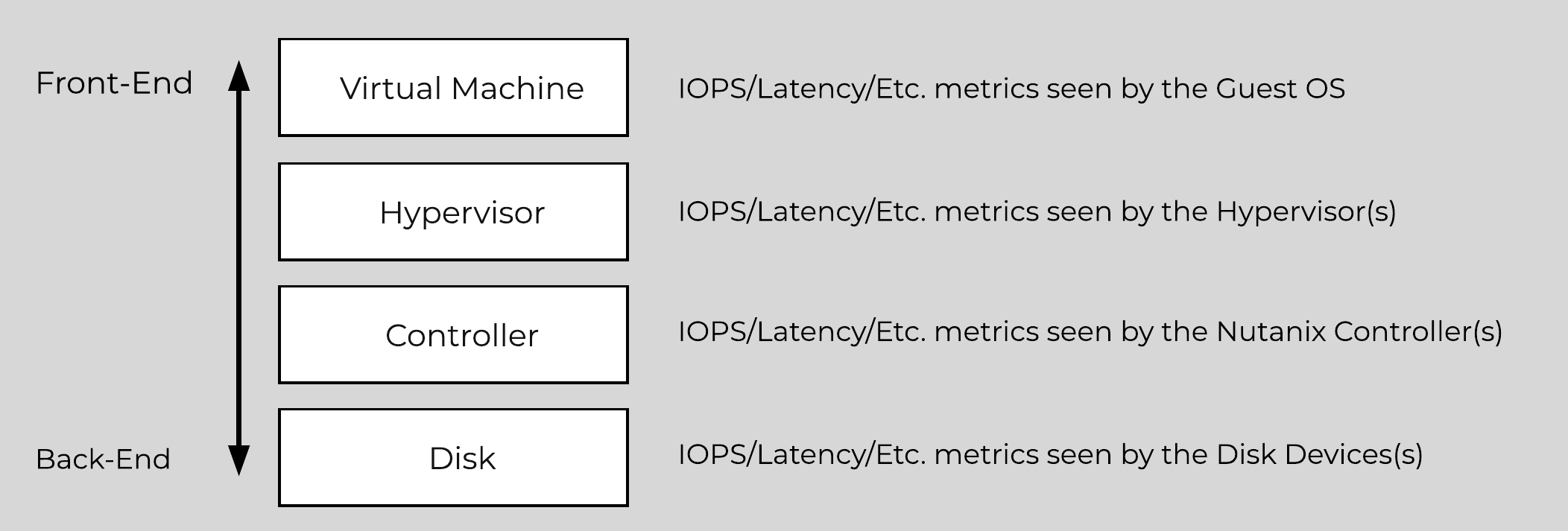 Storage Layers
Storage Layers
Metrics and time series data is stored locally for 90 days in Prism Element. For Prism Central and Insights, data can be stored indefinitely (assuming capacity is available).
©2025 Nutanix, Inc. All rights reserved. Nutanix, the Nutanix logo and all Nutanix product and service names mentioned are registered trademarks or trademarks of Nutanix, Inc. in the United States and other countries. All other brand names mentioned are for identification purposes only and may be the trademarks of their respective holder(s).